Intro to Communication Protocols
- Networking is just copying bits from one place to another
- To split processes up into modules is helpful when you want those processes to run in parallel
- Modularity avoids interference between processes
- Analogy to human speech: language is the protocol layer, the microphone is the physical layer
Protocols, Connectors, Media
- Connectors can be used with different protocols, so an ethernet connector can also be used for serial communication etc.
- Often protocols are nested inside each other, such as WiFi: It has many layers, with the outer layer being the WPA2 encryption
- Information can be transmitted via different media, such as cable, optic, radio frequency
Network Topology
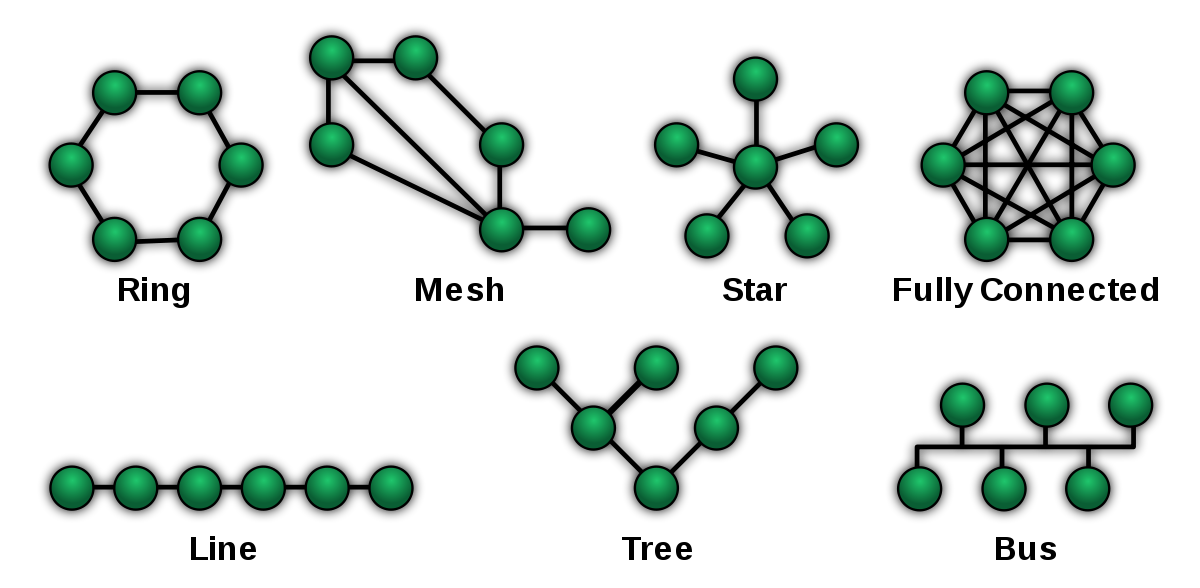
Different possible network topologies.
- A bus topology is very common for wired communication
- With radio communication, a mesh topology is more common. This can help with relaying messages, such as a node relying a message to another recipient
- The network topology is what determines, how a punctual failure impacts the network (such as a single point-of-failure)
- Errors always happen, always relative to the speed and distance. This is why most protocols have error correction built in
Hint: This is why when flashing a microcontroller via serial, take down the speed when transmitting in order to reduce the chance for errors
Wired Communication
Serial vs. parallel communication
- Recap: Ones and zeroes are just changes in voltage in the cable. The change of voltage is agreed upon in the physical protocol
- In serial communication, a byte is sent one bit after the other through the same wire
- In parallel communication, eg. eight wires transmit one bit of the byte in parallel. This enables a much faster communication speed
- When the communication speed of today, serial communication is almost always preferable. This is also related to the price of the physical wires
Synchronous vs. Asynchronous
- Synchronous communication relies on a CLK (clock) signal which defines the timing of the sent messages (such as the baud rate in Arduino)
- Asynchronous communication means that there is no clock line, thus it needs to signal when a message begins and ends
- RX/TX is the most common way of serial communication, it includes a start bit and a stop bit
- It also uses dedicated receive and transmit pins, which have to be wired across
- For Synchronous communication, SPI and I2C are popular protocols
> A lot more notes here
Connecting two ESP32 via Wifi
For the communication and networking homework I teamed up with Tatiana (her documentation here) to make two ESP32s connect via local wifi network. We used an excellent tutorial to to give us a better understanding of the pieces involved. We then modified the tutorials sketches to send a static string of text instead of dynamic sensor readings. This was done to have a simple proof-of-concept, that can easily be expanded on. In the end, it is a matter of how the respective variable(s) on the server side are static or constantly updated. This is what I want to try at home for the next step: Updating a local server according to room temperature readings.
For the two sketches involved, the structure was relatively straight forward . After installing the ESPAsyncWebServer library and Async TCP library (who handle different parts of the server side), we would set up a local wifi network on one ESP32, specifying our SSID and passphrase. For the client side, only the HTTClient library was needed (available via the library manager). For both microcontrollers, of course Wifi.h was additionally loaded in order to interface with the wifi antennas. After that, it was a matter of simply specifying data to be hosted on the server side and retrieving that payload via a HTTP-request on the client side. Printing both outputs helped us to follow the steps and debug any connection problems that arose in the meantime. The resulting infrastructure has an enormous potential, especially in locally defined scenarios, such as smart home automation schemes.

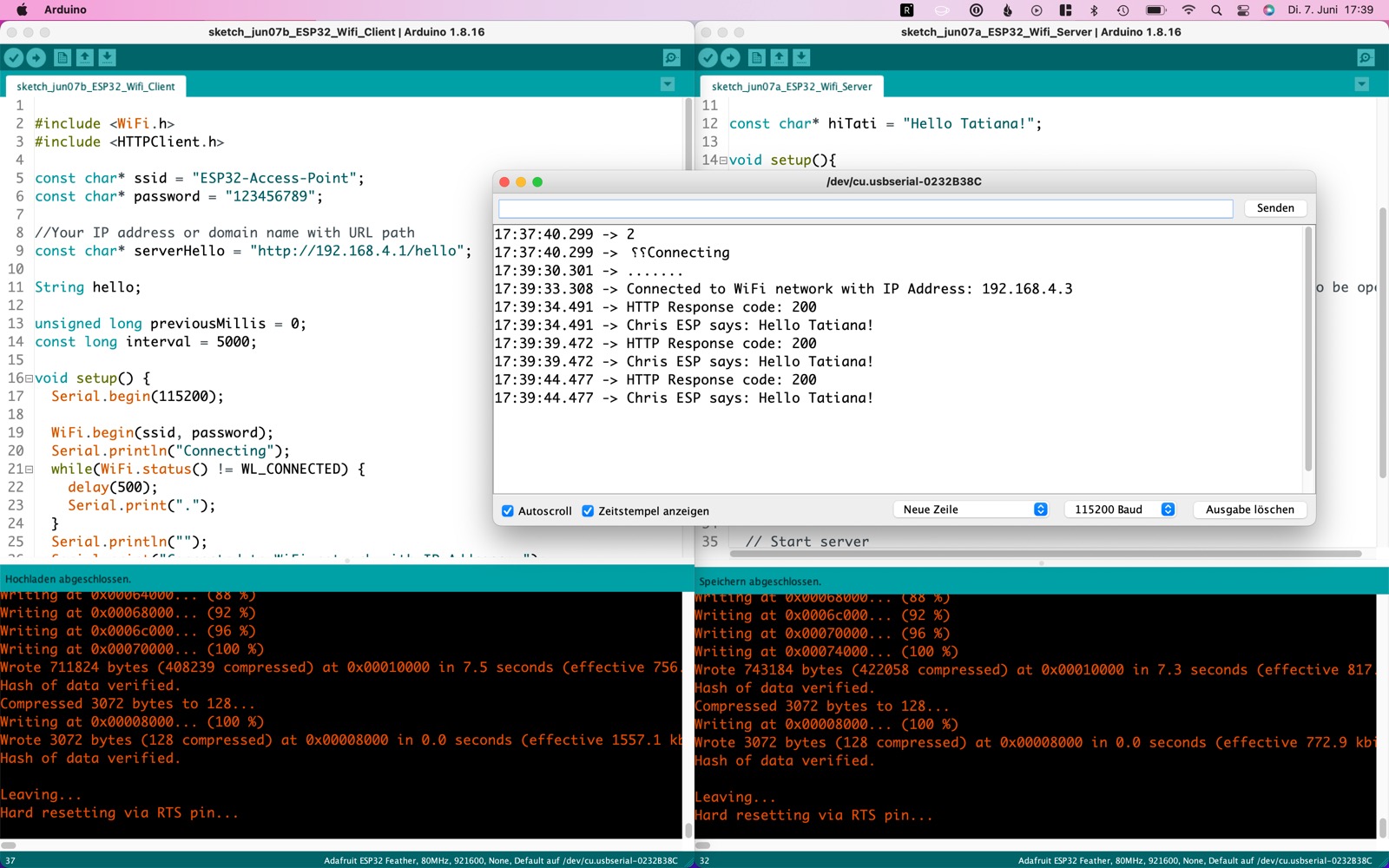
After logging into the wifi of the ESP32 server, the output string can be read under the ESP's IP address (left). On the client side, the same string is received and printed into the serial monitor (right).
A visual representation of the two ESPs talking to each other.
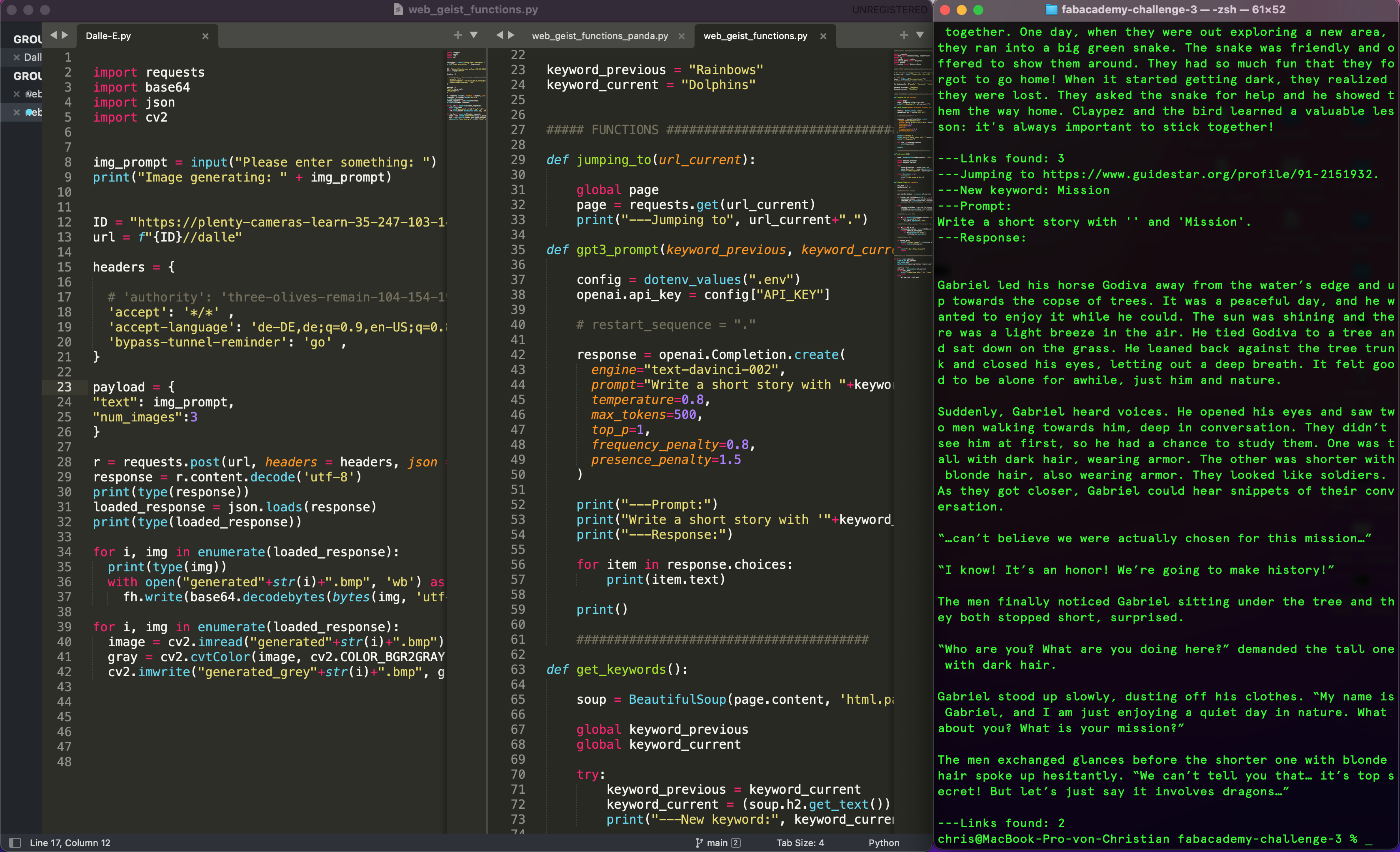
Interfacing with a Server via API
To further practice networking between computers, I wrote a Python script that interfaces with OpenAI GPT3 API to generate short stories after scraping keywords from the internet. The script opens the URL of the API endpoint, and sends the AUTH token as identification. After receiving a positive confirmation, we can send prompts to GPT3. A couple of seconds after we send an API call, specifying the prompt and a dozen other parameters, we get a response back in JSON format. The format is nested into lists and libraries, so one API answer can carry multiple sets of data, all with their individual associated parameters. By parsing the respective lists in the JSON response, we can then extract our GPT3-generated text.
The user interface consists of the command line prompting the user to input the starting URL and the number of jumps. More on the project can be found here.
Further Links
Networking and Communications
purposes
location
parallelism
modularity
interference
wired
asynchronous
RS-232, RS-422, RS-485
MPCM
ATtiny45
components
video
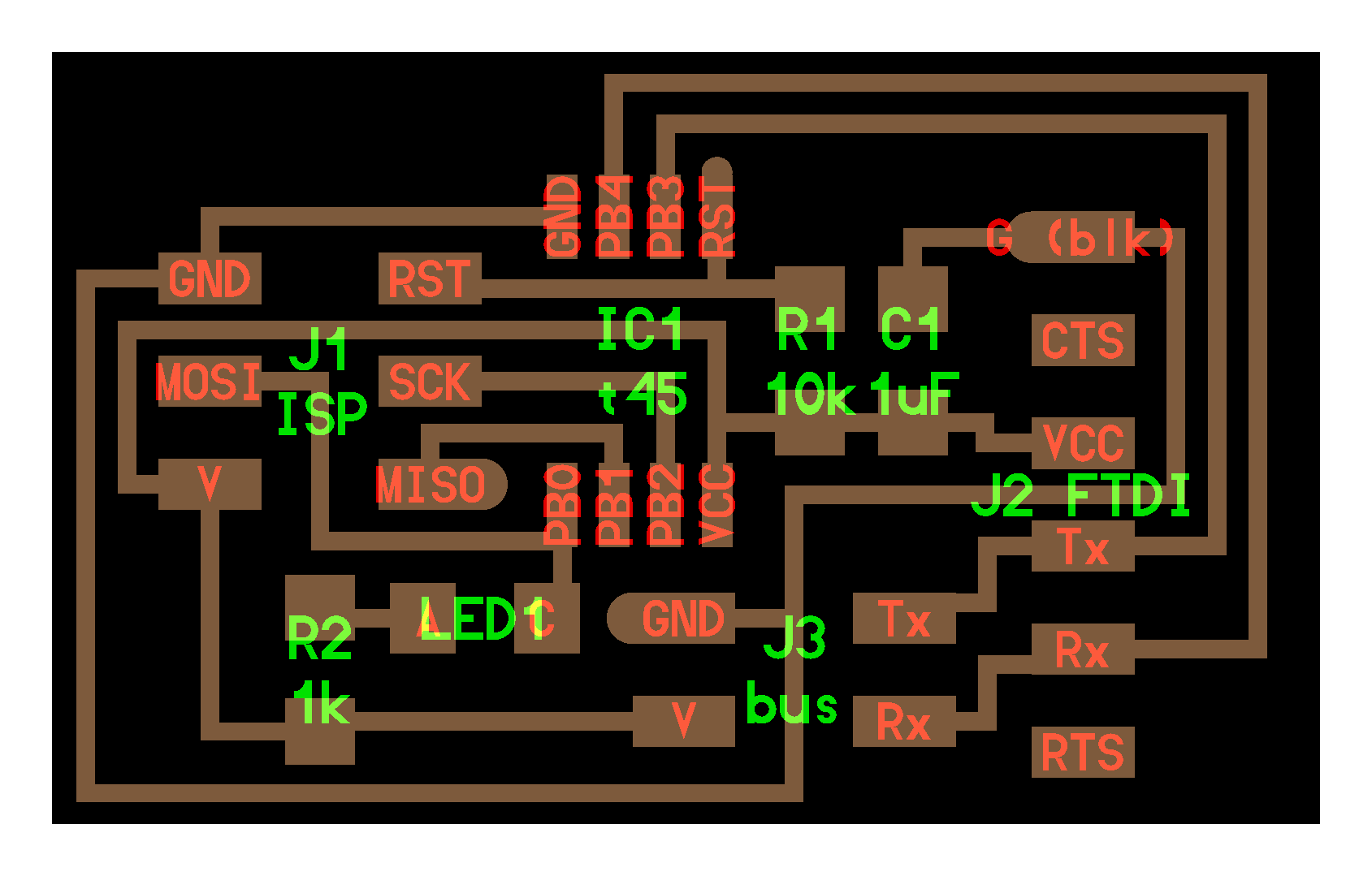
hello.bus.45.bridge
board
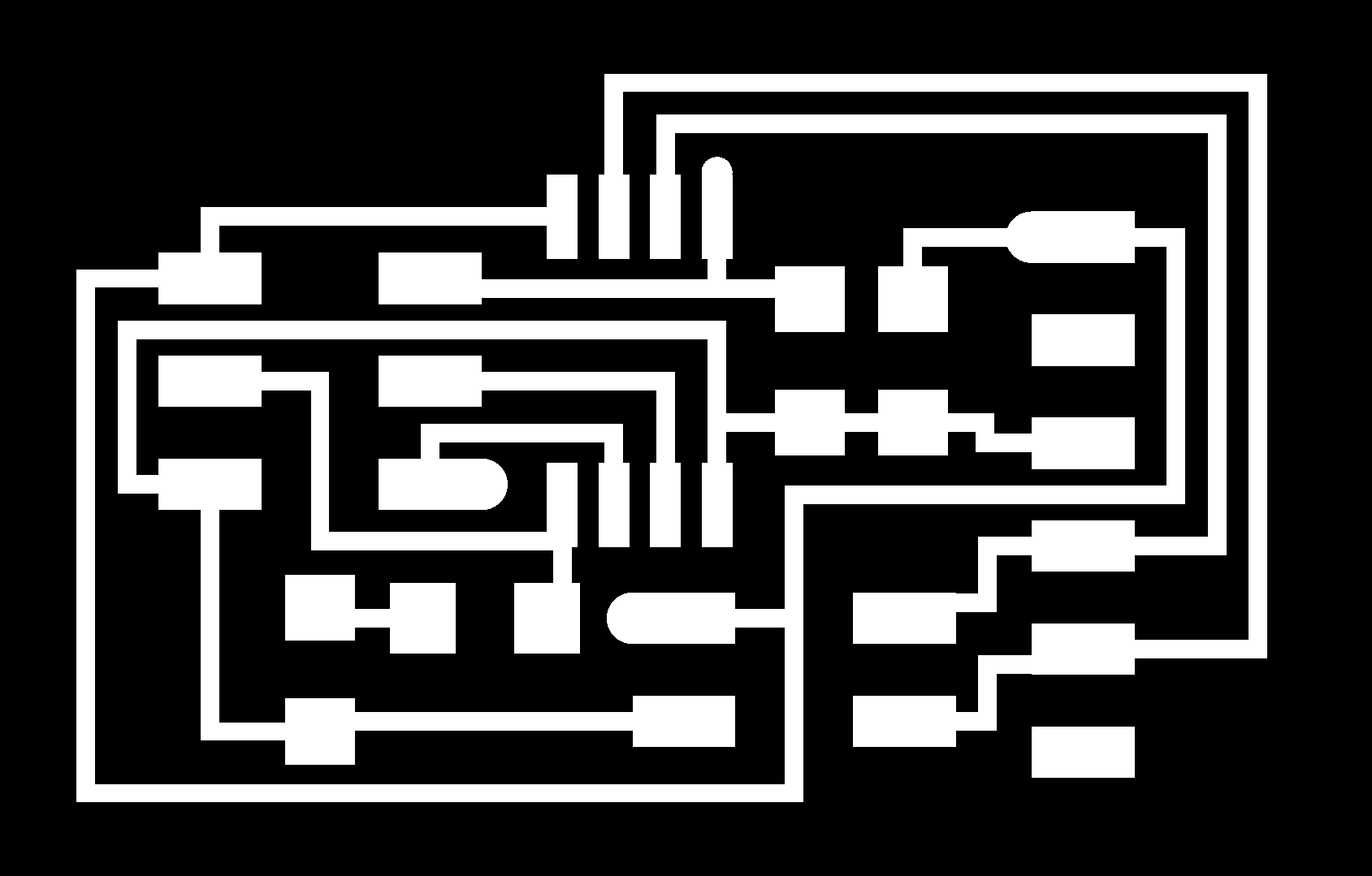
traces
interior
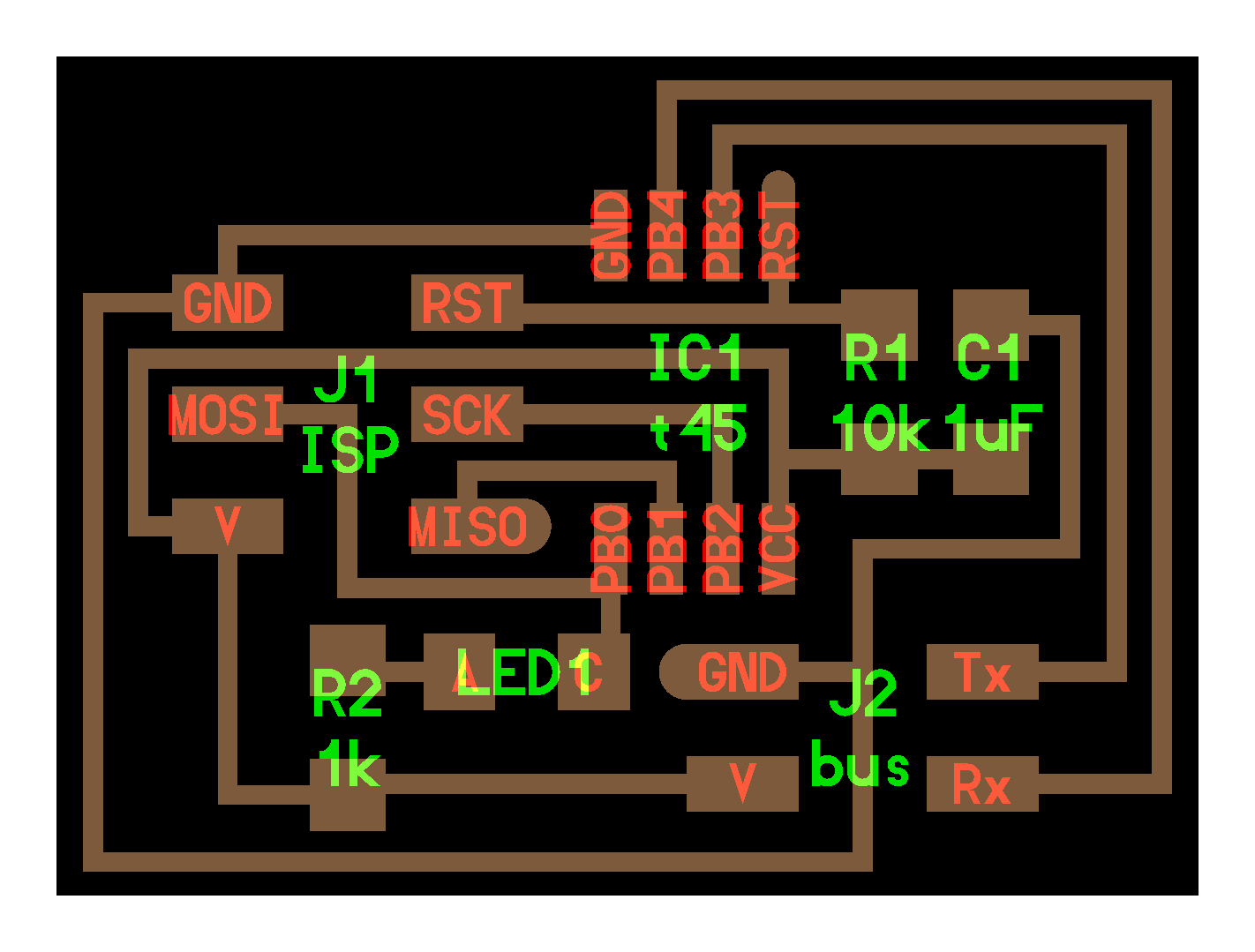
hello.bus.45.node
board
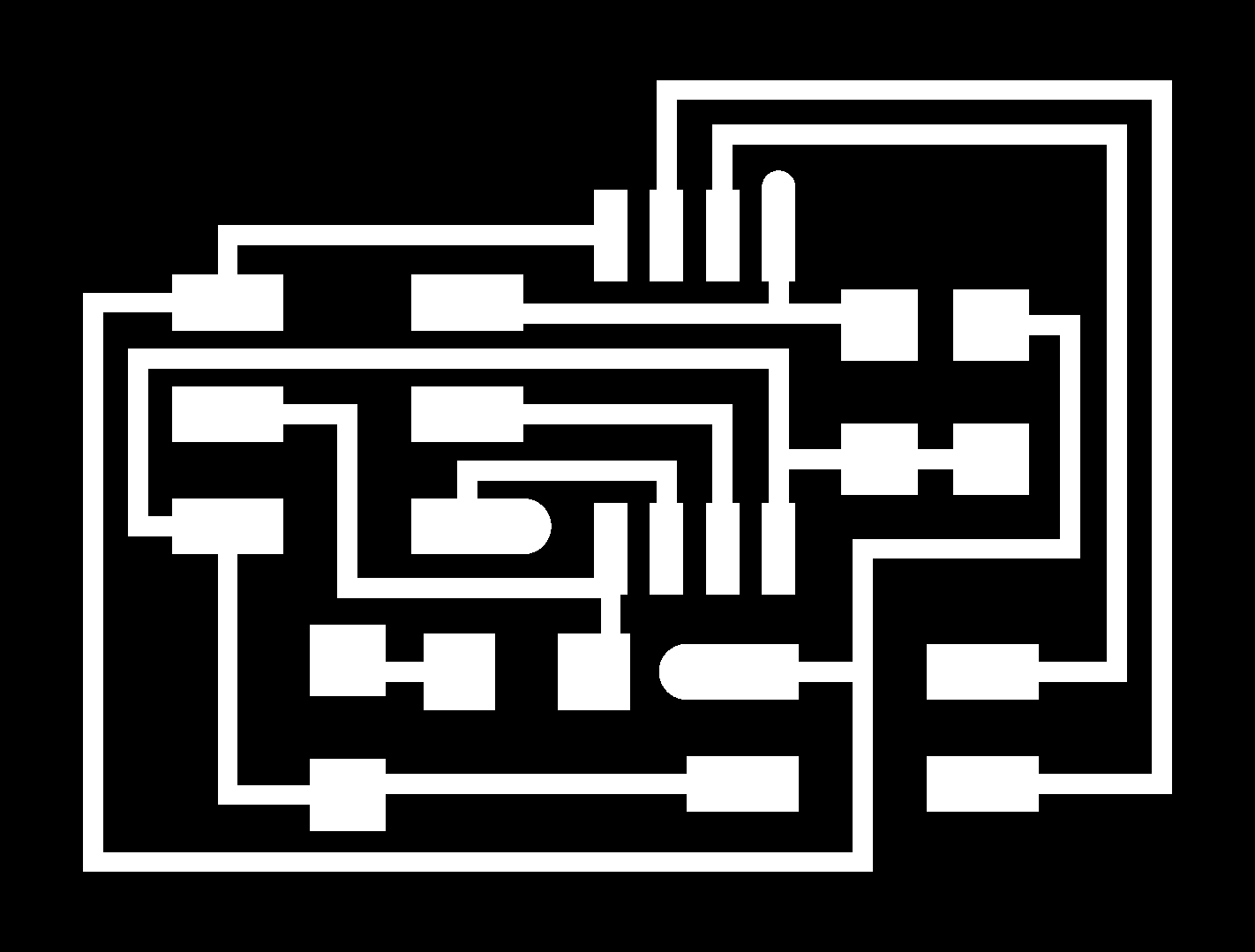
traces
interior
hello.bus.45.c
makefile
ATtiny412
hop-count
chip
LED
strip
SPI
MISO/MOSI, CIPO/COPI
master/secondary, controller/peripheral
library
bit-bang
(*)RAM
ESP-PSRAM64H
SD memory cards
specification
FAT
library
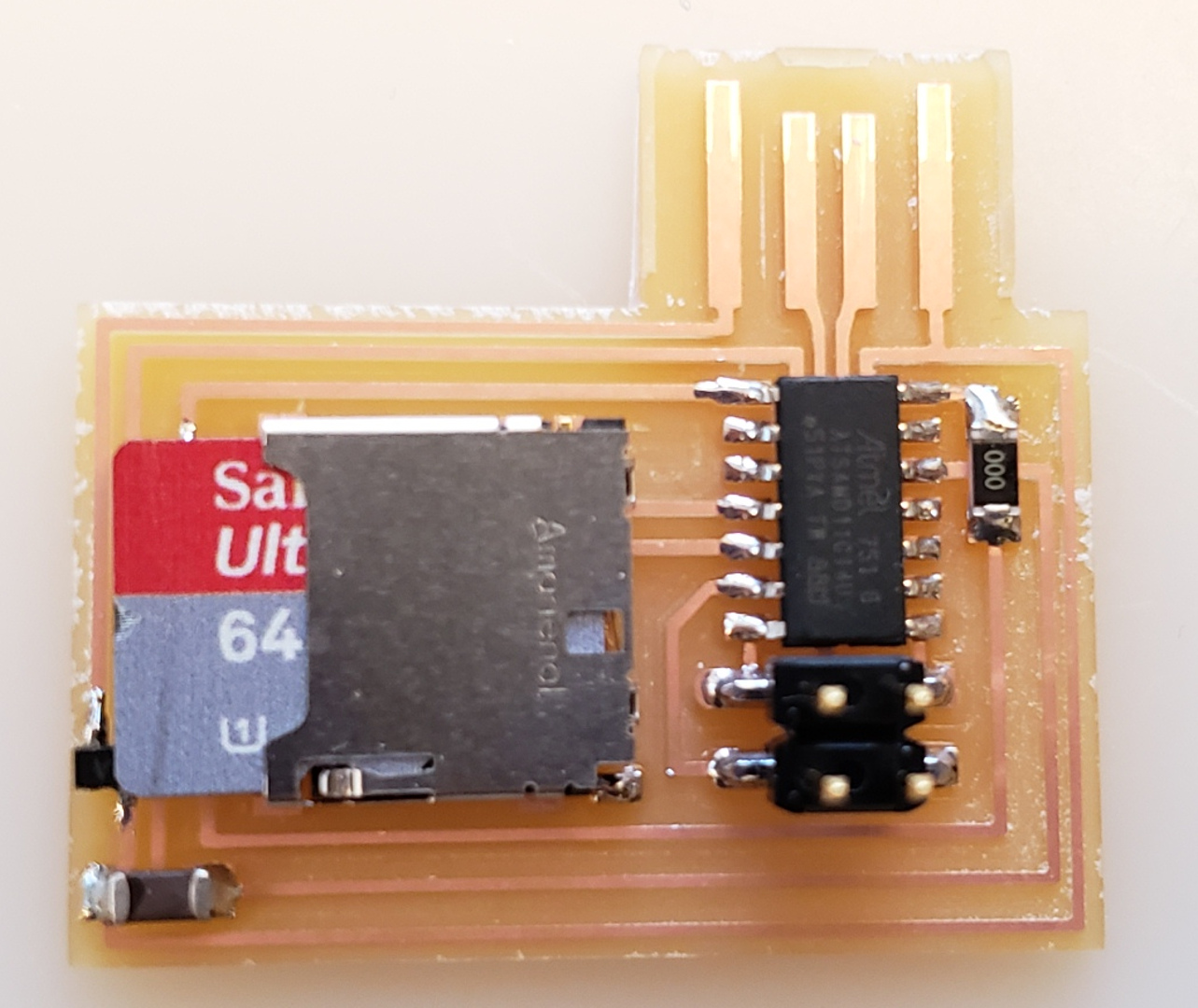
hello.uSD.D11C
board
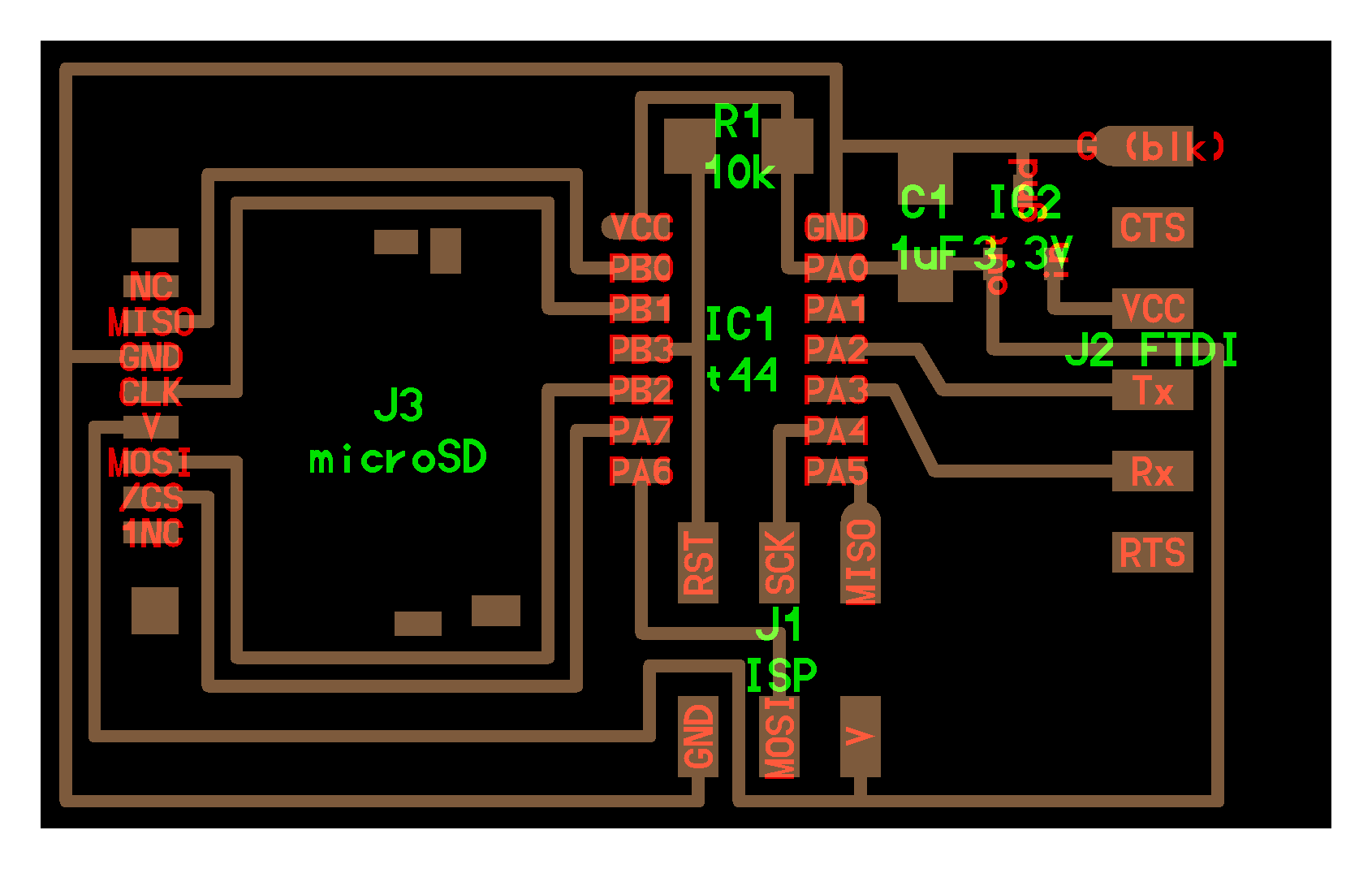
components
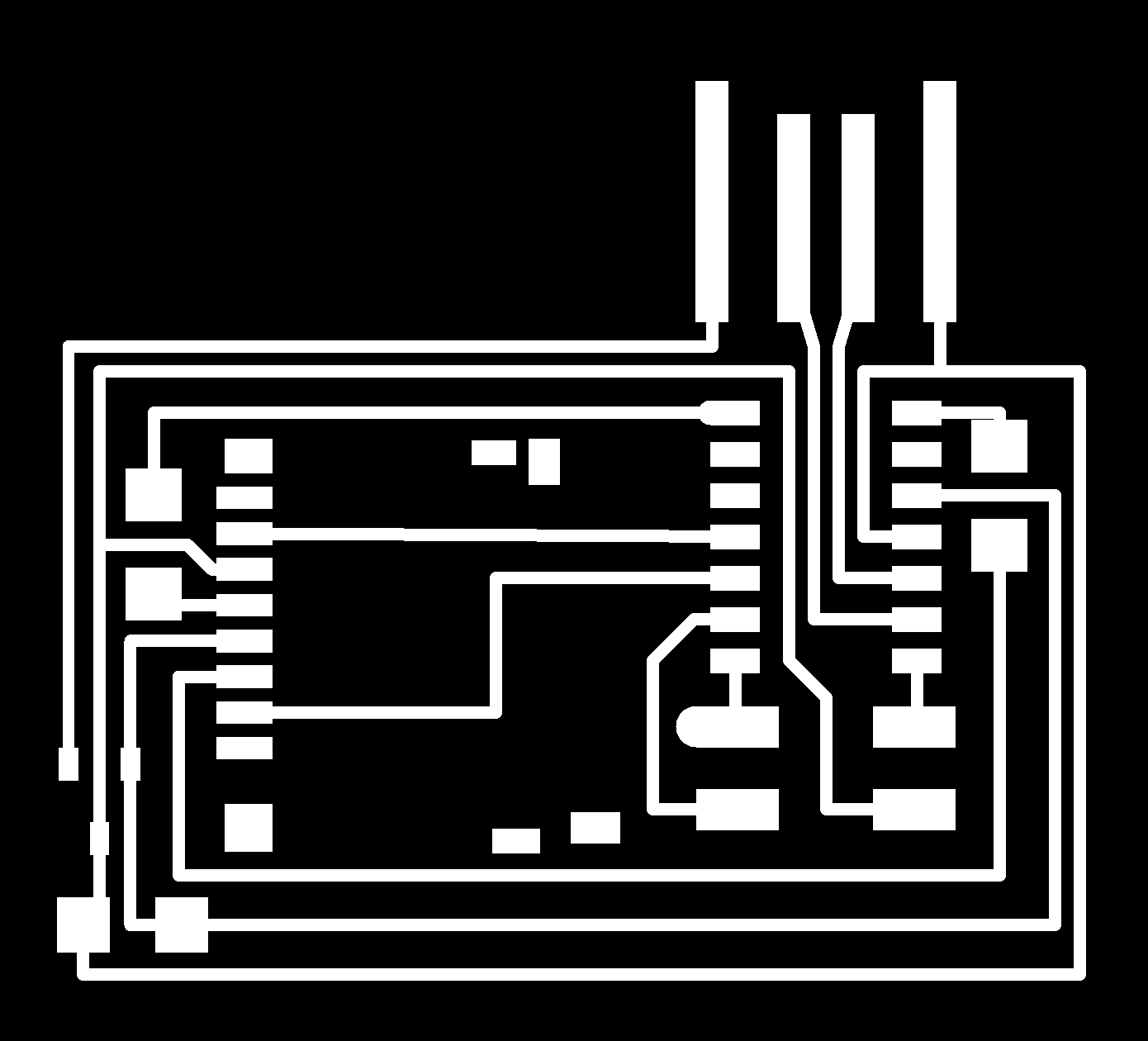
traces
interior
hello.uSD.D11C.ino
video
hello.uSD.44
board
components
traces
interior
hello.uSD.44.read.c
make
output
I2C
Qwiic
STEMMA
hardware
software
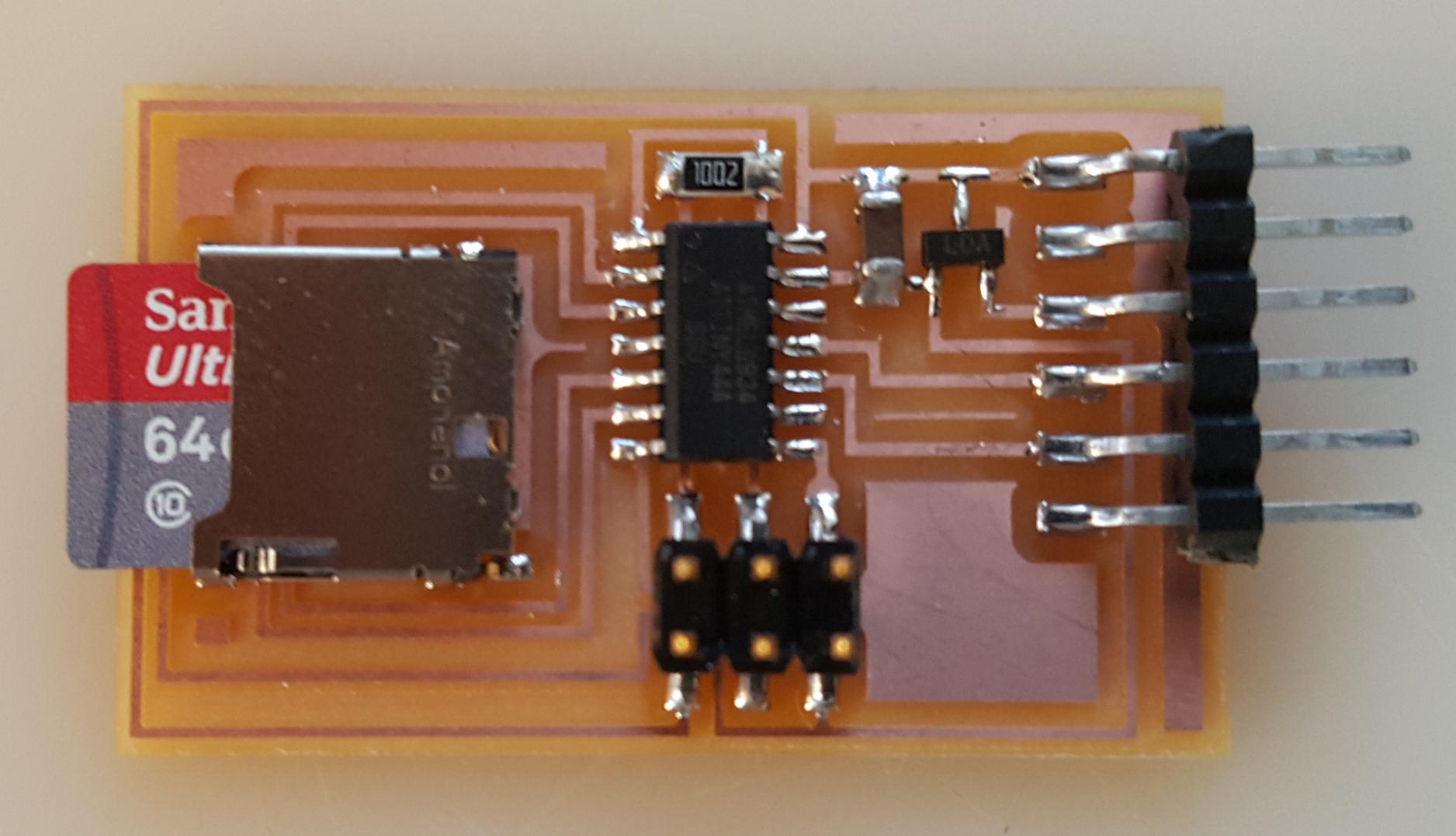
hello.I2C.t1614
board
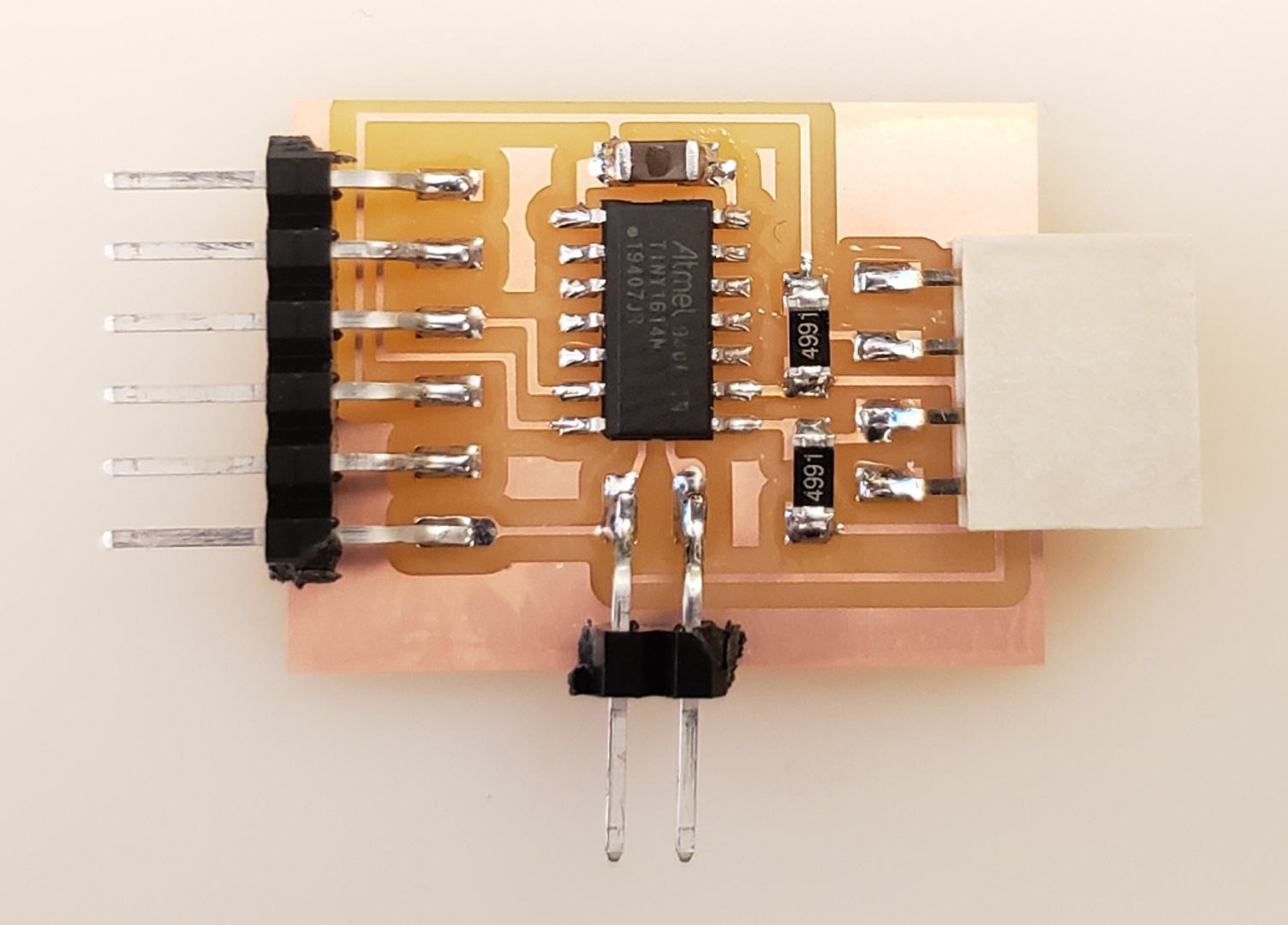
components
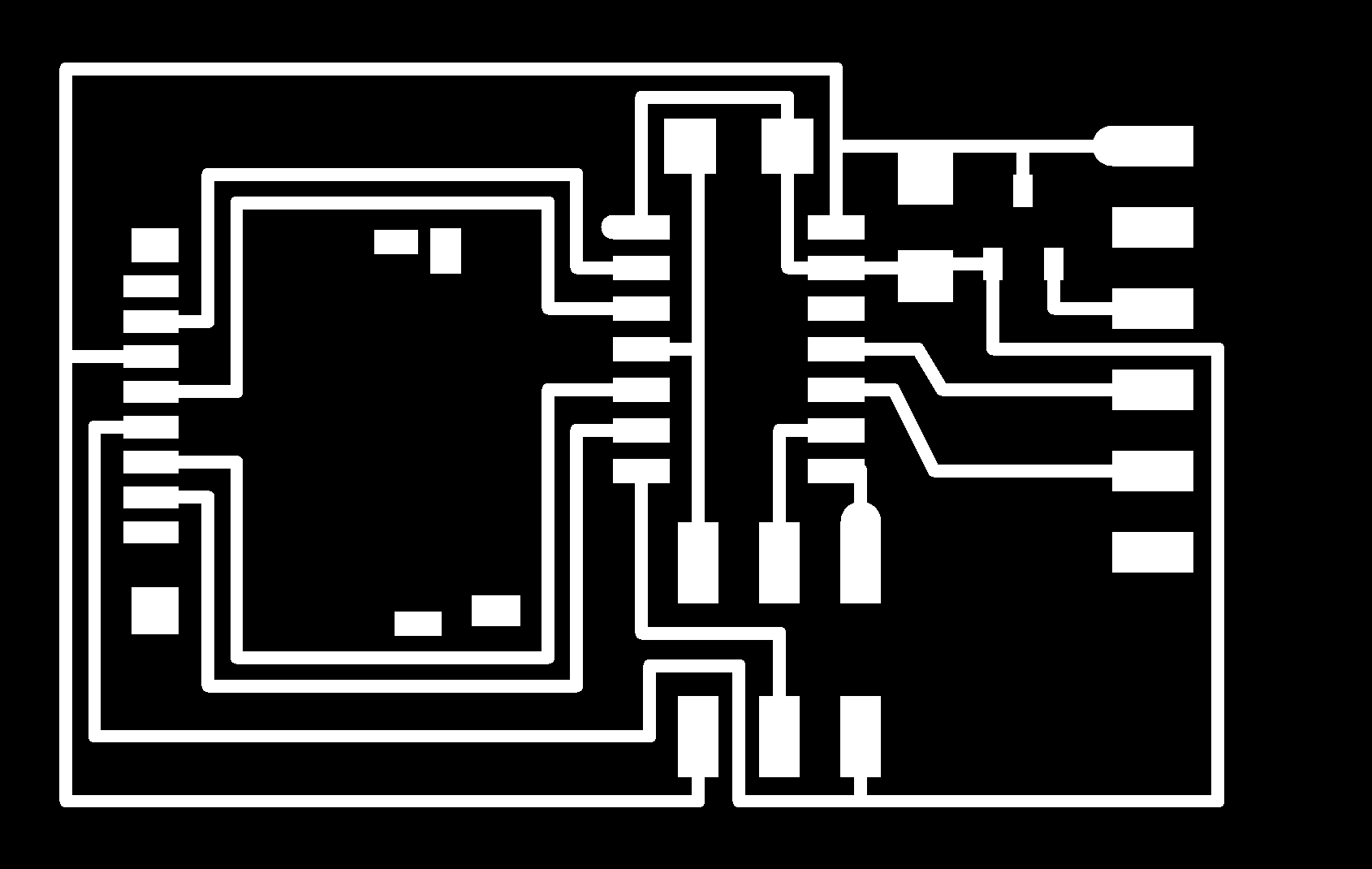
traces
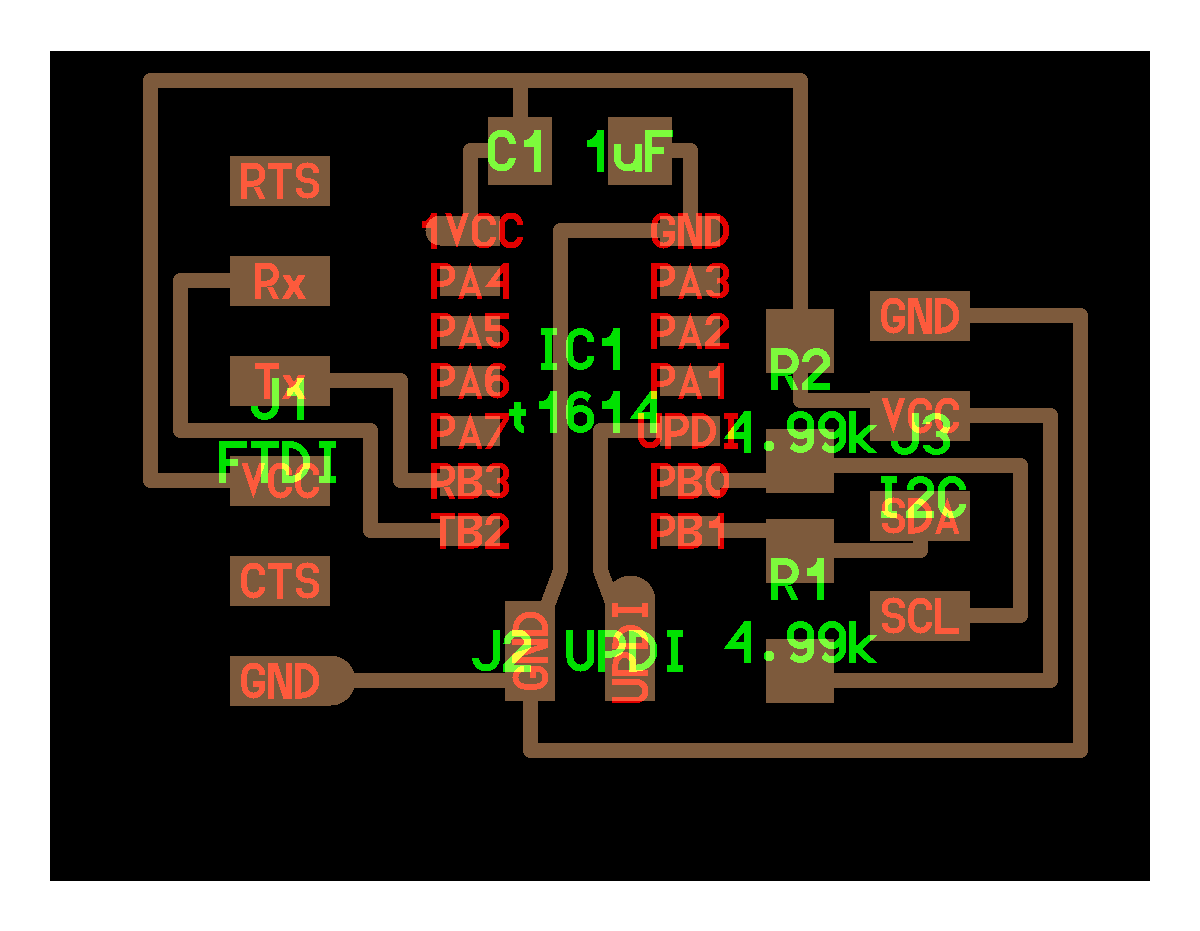
interior
hello.I2C.ino
video
USB
ASF
HID
MIDI
Host
Ethernet
chip
module
CAN,
LIN
MODBUS
DMX
OSI layers
7: application (HTTP)
6: presentation (SSL)
5: session (RPC)
4: transport (TCP, UDP)
3: network (IP)
2: data link (MAC)
1: physical (PHY)
physical media
capacity
bandwidth * log_2 (signal/noise)
wired
single-ended, differential, powerline
open collector, open drain
transmission (pass) gate, tri-state
transmission line
waveguide
SONET optical fiber
wireless
RF
FCC
Part 15
ISM
802.11
Wi-Fi
802.15
ZigBee
6LoWPAN
Bluetooth
BLE
GATT
GAP
UUID
Services
app
stack
optical
transmitter
receiver
LiFi
acoustic
modulation
PCM: Pulse-Code Modulation
PPM: Pulse-Position Modulation
OOK: On-Off Keying
FSK: Frequency-Shift Keying
BPSK: Binary Phase-Shift Keying
QAM: Quadrature Amplitude Modulation
OFDM: Orthogonal Frequency-Division Multiplexing
FHSS: Frequency-Hopping Spread Spectrum
DSSS: Direct-Sequence Spread Spectrum
UWB: Ultra-WideBand
channel sharing
ALOHA
Master-Secondary
Token Ring
TDMA: Time-Division Multiple Access
FDMA: Frequency-Divsion Multiple Access
CSMA: Carrier-Sense Multiple Access
CD: Collision Detection
CA: Collision Avoidance
1-persistent: transmit when clear
nonpersistent: random backoff
p-persistent: probability to transmit
CDMA: Code-Division Multiple Access
MIMO: Multiple-Input Multiple-Output
"PDMA": Physical-Division Multiple Access
errors
detection, correction
block, convolution codes
parity, checksum, Hamming, Reed-Solomon, Turbo
networking
Internet protocols
RFCs
IPv4, IPv6
unrouted, routed, unicast, multicast, broadcast addresses
DNS
DHCP
NAT
PAT
private
UDP, TCP
HTTP
BGP
AODV
ROLL
sockets
udpsnd.js
udprcv.js
video
udpsnd.py
udprcv.py
udpsnd.c
udprcv.c
Wireshark
SLIP
slattach
route
hello.bus.45.SLIP.c
makefile
udp_slip.py
video
wireless
radios
oscillator, mixer, PA, LNA, IF, I/Q, demod, baseband, filters
antennas
Q, antenna gain, impedance matching, short antennas
FabFi
single-chip
MFRC522 (13.56 MHz RFID)
chip
module
library
security
hello.MFRC522.t1614
board
components
traces
interior
video
nRF905 (433/868/915 MHz ISM)
chip
module
library
nRF24L01+ (2.4 GHz ISM)
chip
module
library
project antennas
hello.nRF24L01P.44
board
components
traces
interior
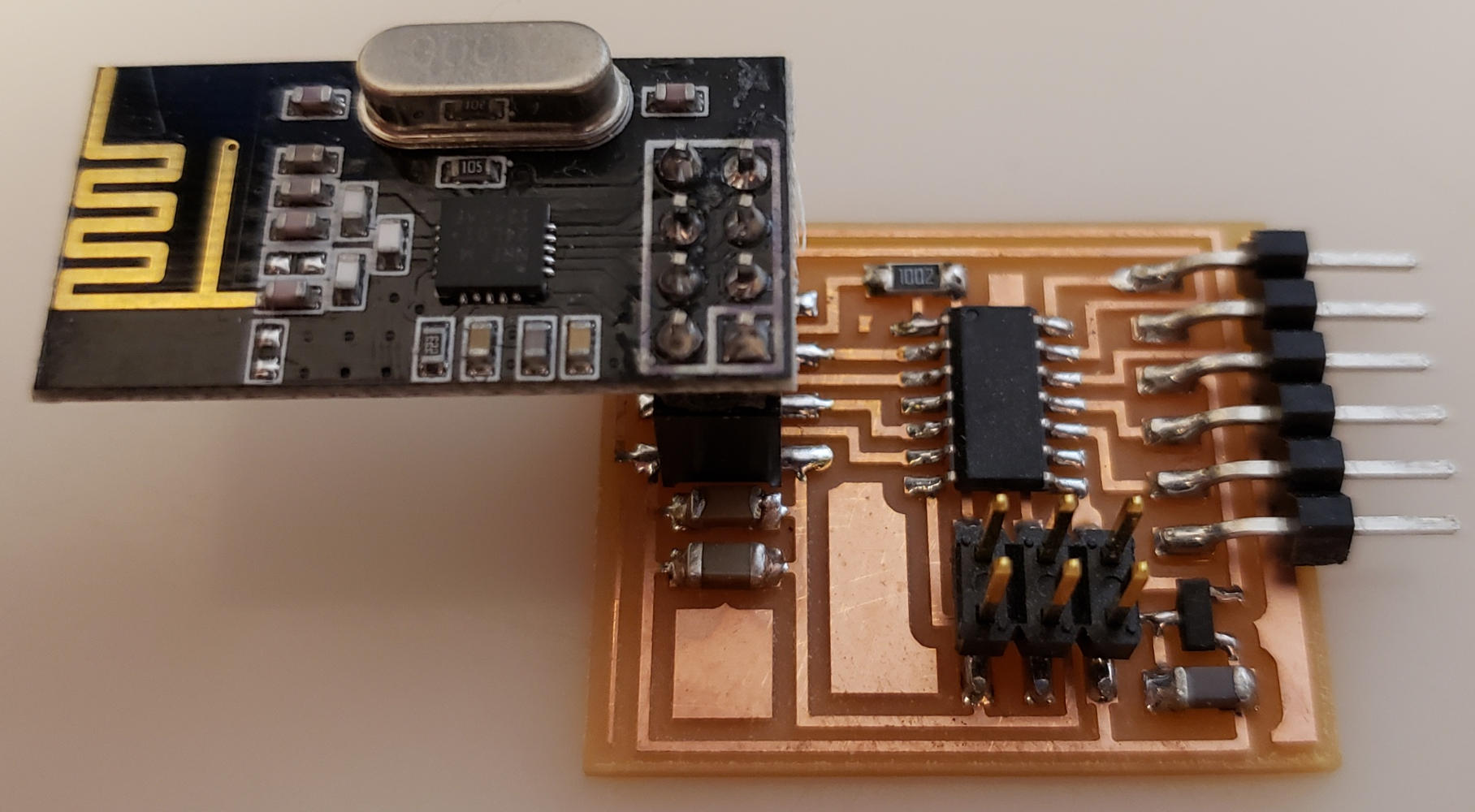
RN4871 (2.4 GHz Bluetooth)
chip
module
commands
hello.RN4871.ftdi
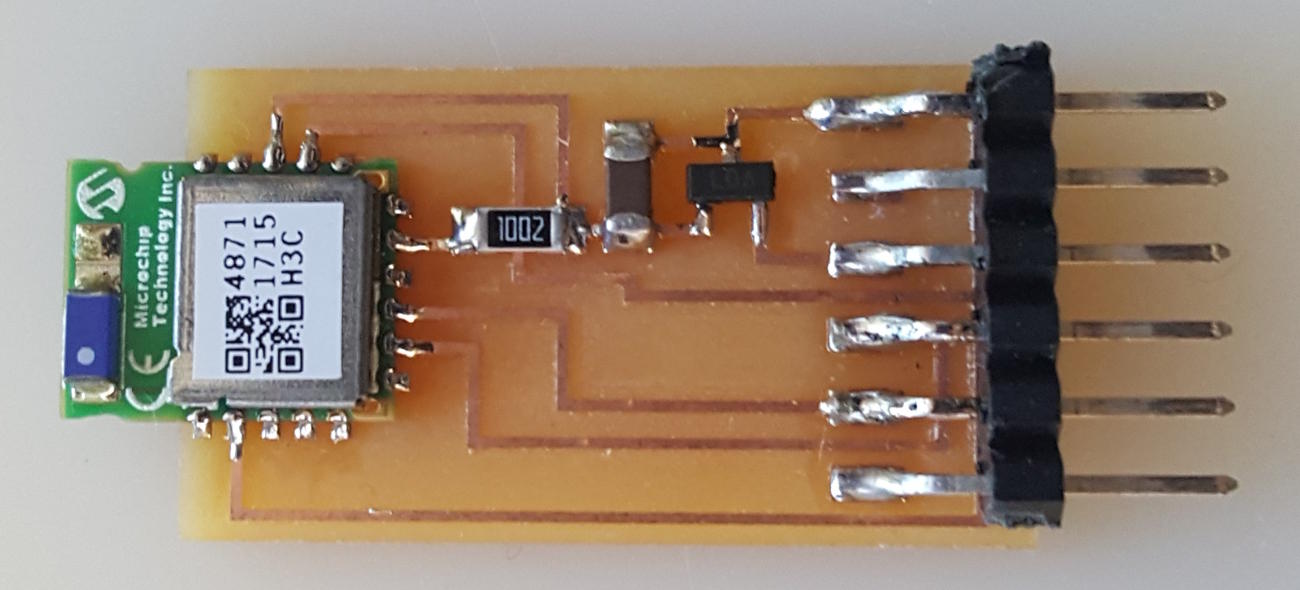
board
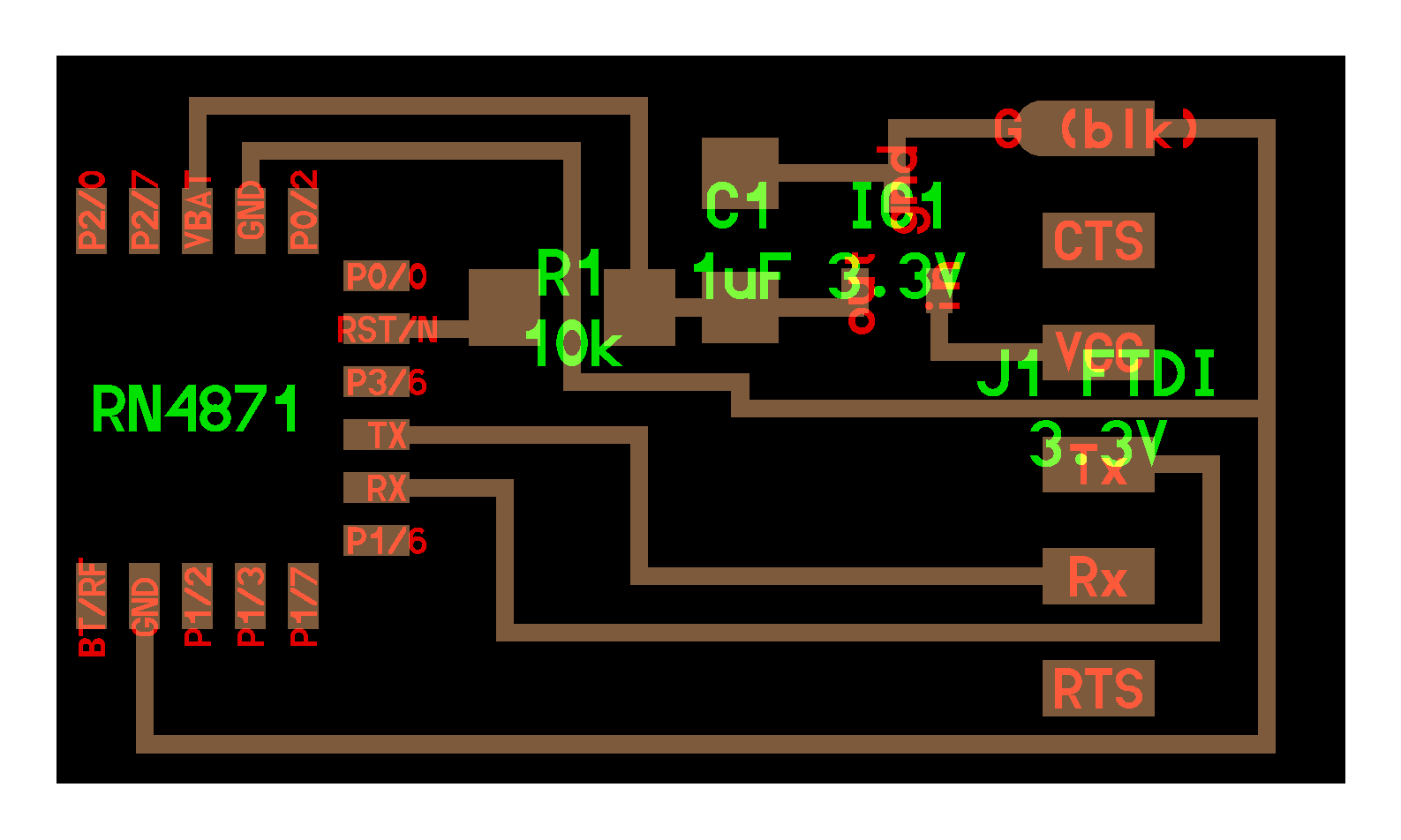
components
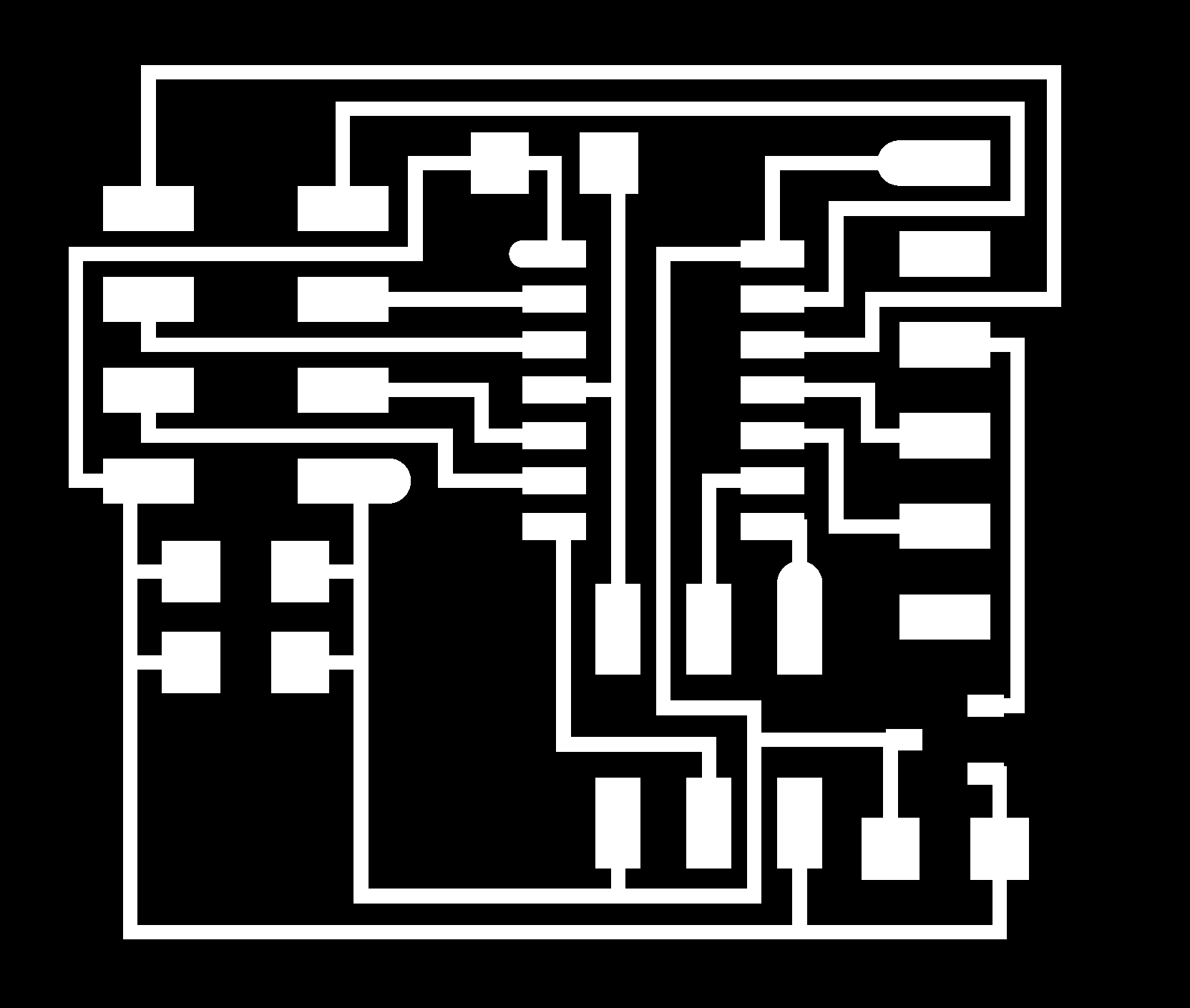
traces
interior
video
CC2541 (2.4 GHz Bluetooth)
chip
HC-08
HM-10
HM-11
commands
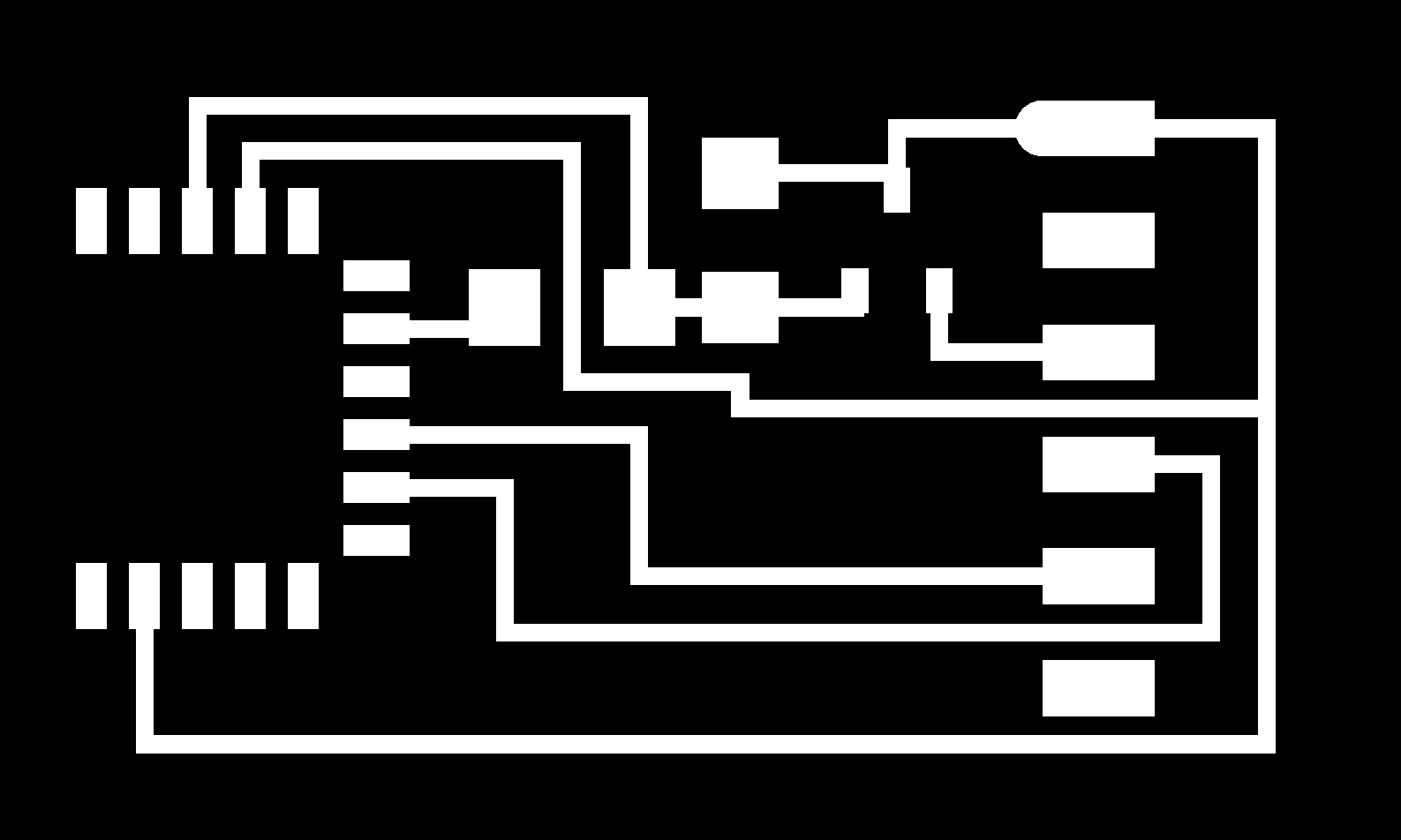
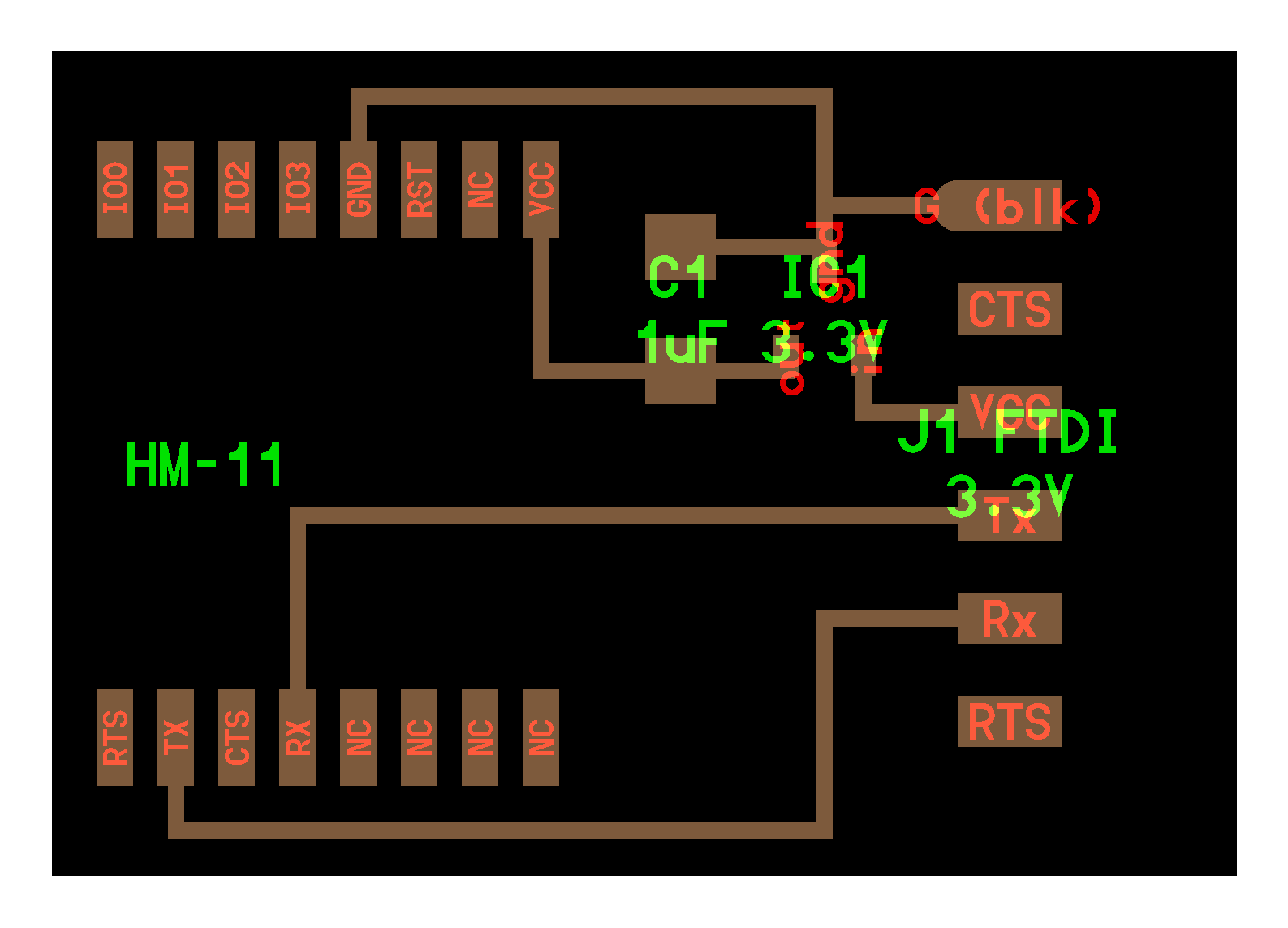
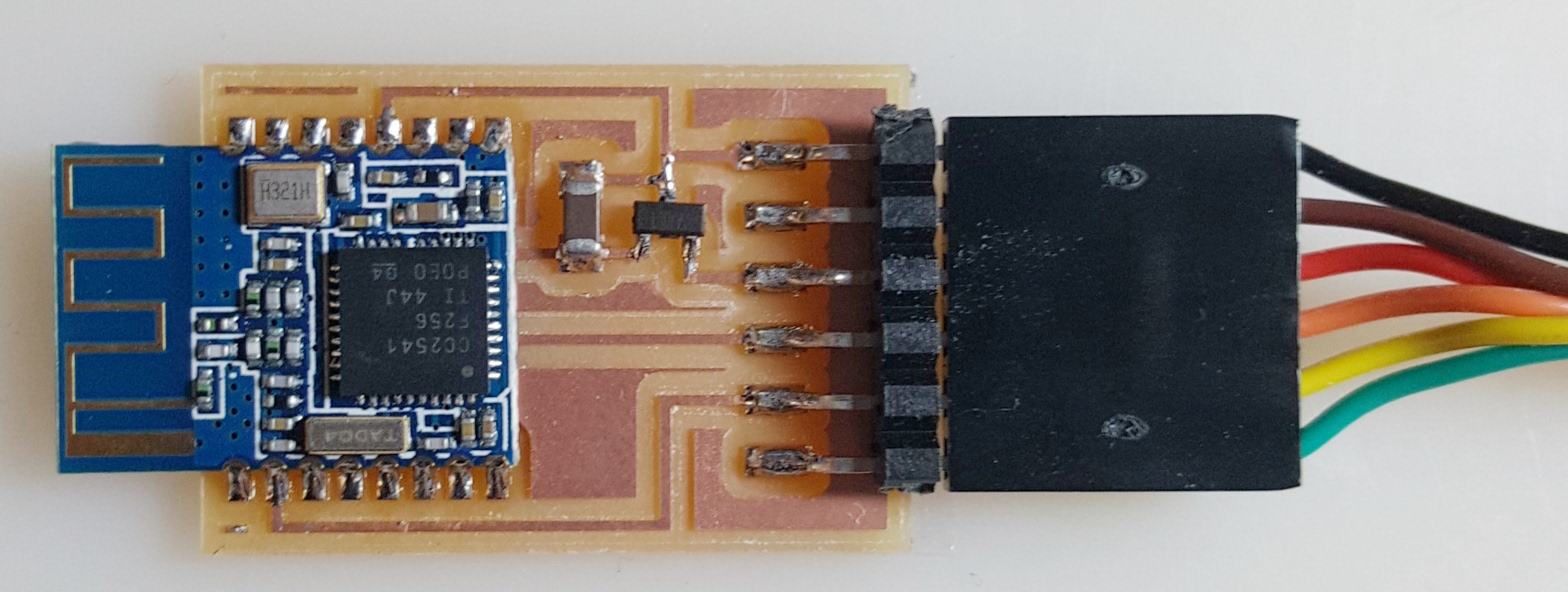
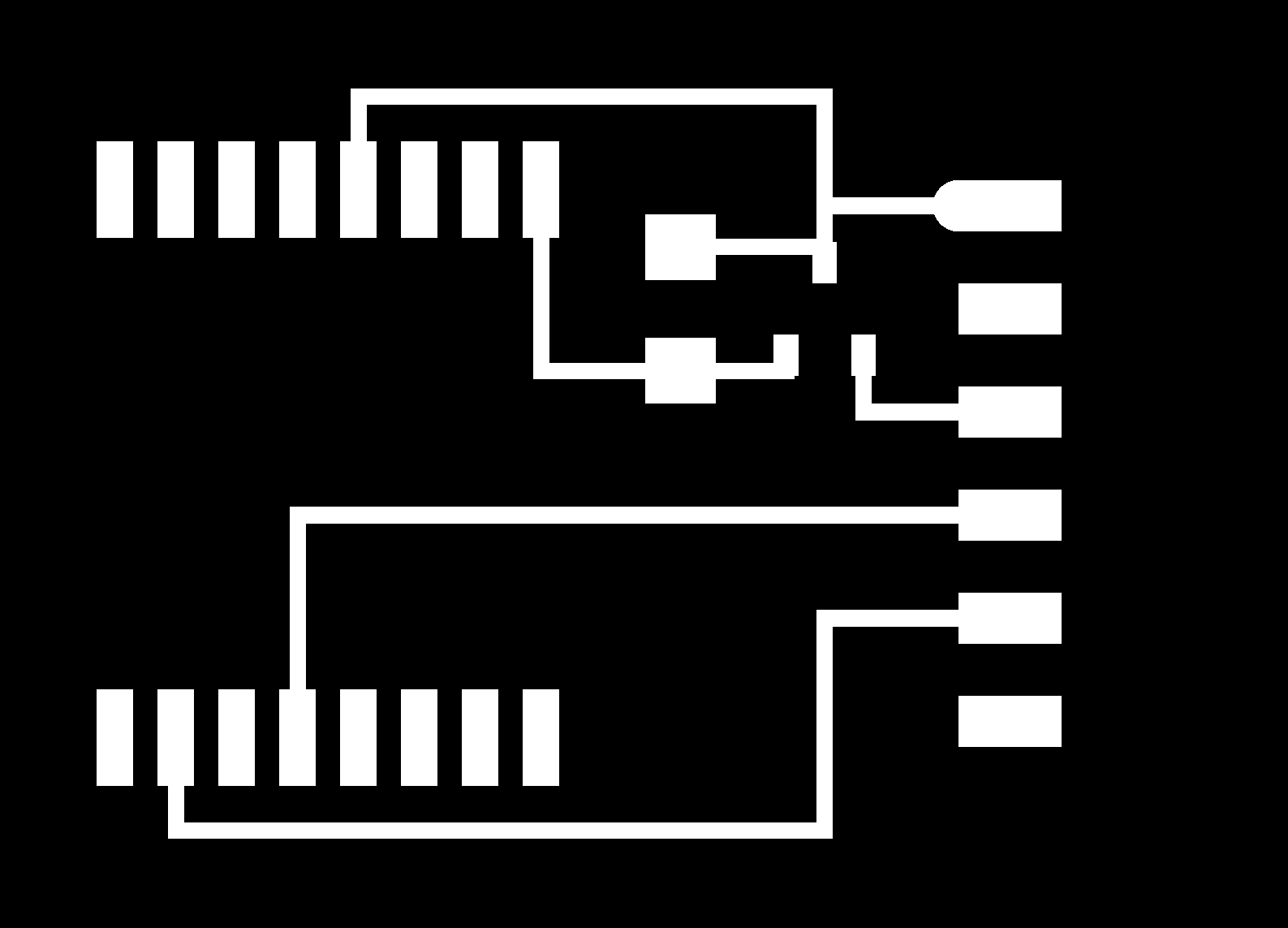
hello.HM-11.ftdi
board
components
traces
interior
video
nRF52 (2.4 GHz Bluetooth, ISM)
chip
module
project
project
CYW43438 (2.4 GHz, Wi-Fi, Bluetooth, FM)
chip
module
board
RFM95/6/7/8 (433/470/868/915 MHz LoRa)
chip
module
LoRaWAN
SX1276 (137-1050 MHz LoRa)
chip
board
ExpressLRS
SIM800L (GSM)
module
ESP8266 (2.4 GHz Wi-Fi)
chip
module
board power
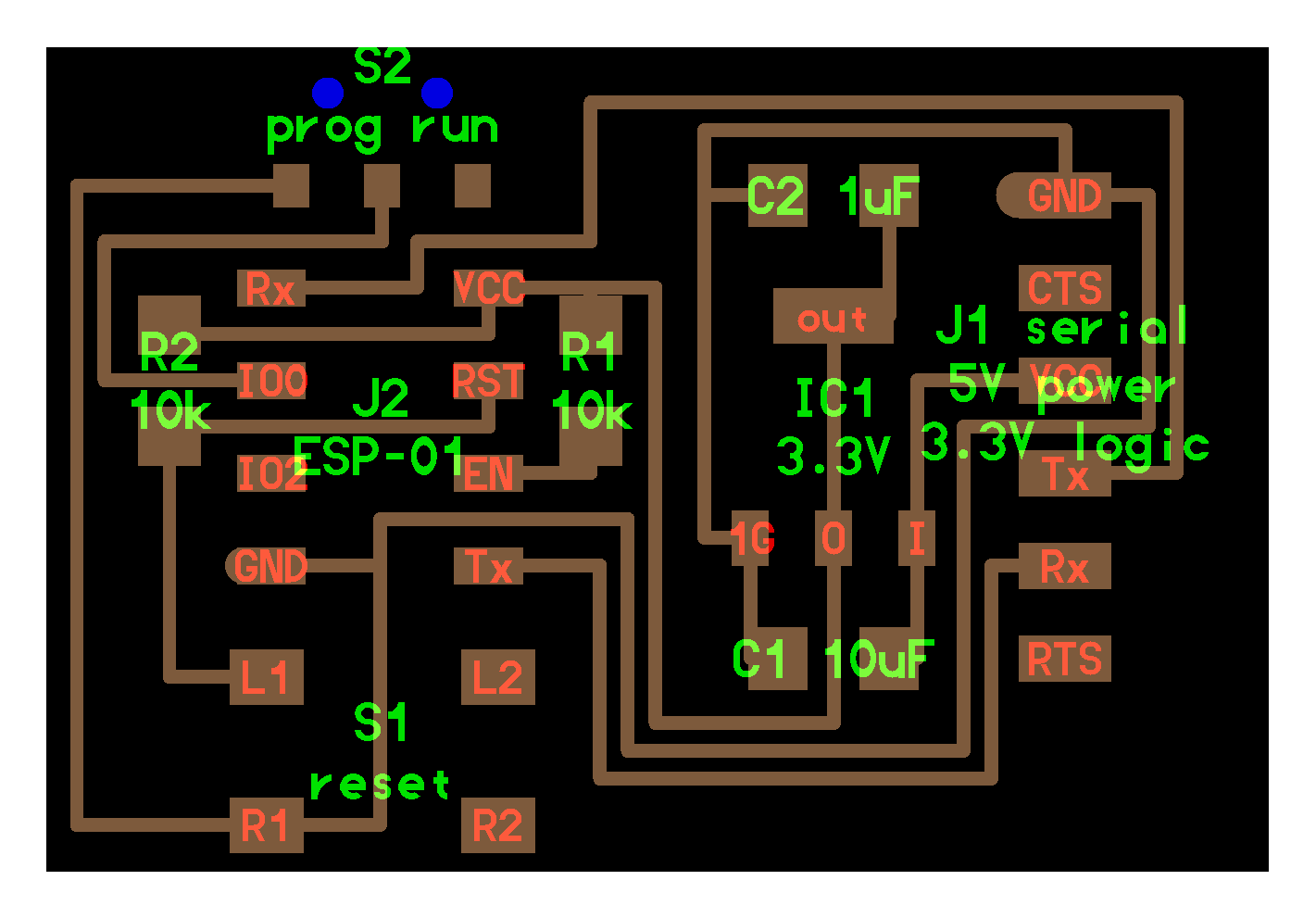
hello.ESP-01
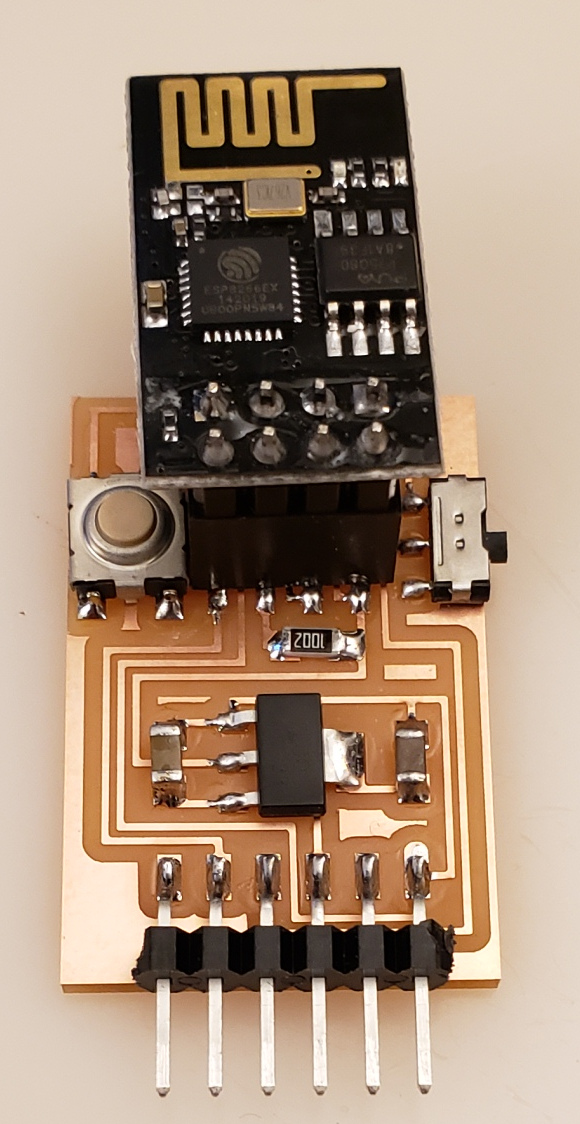
board
components
traces
holes
interior
Web server
video
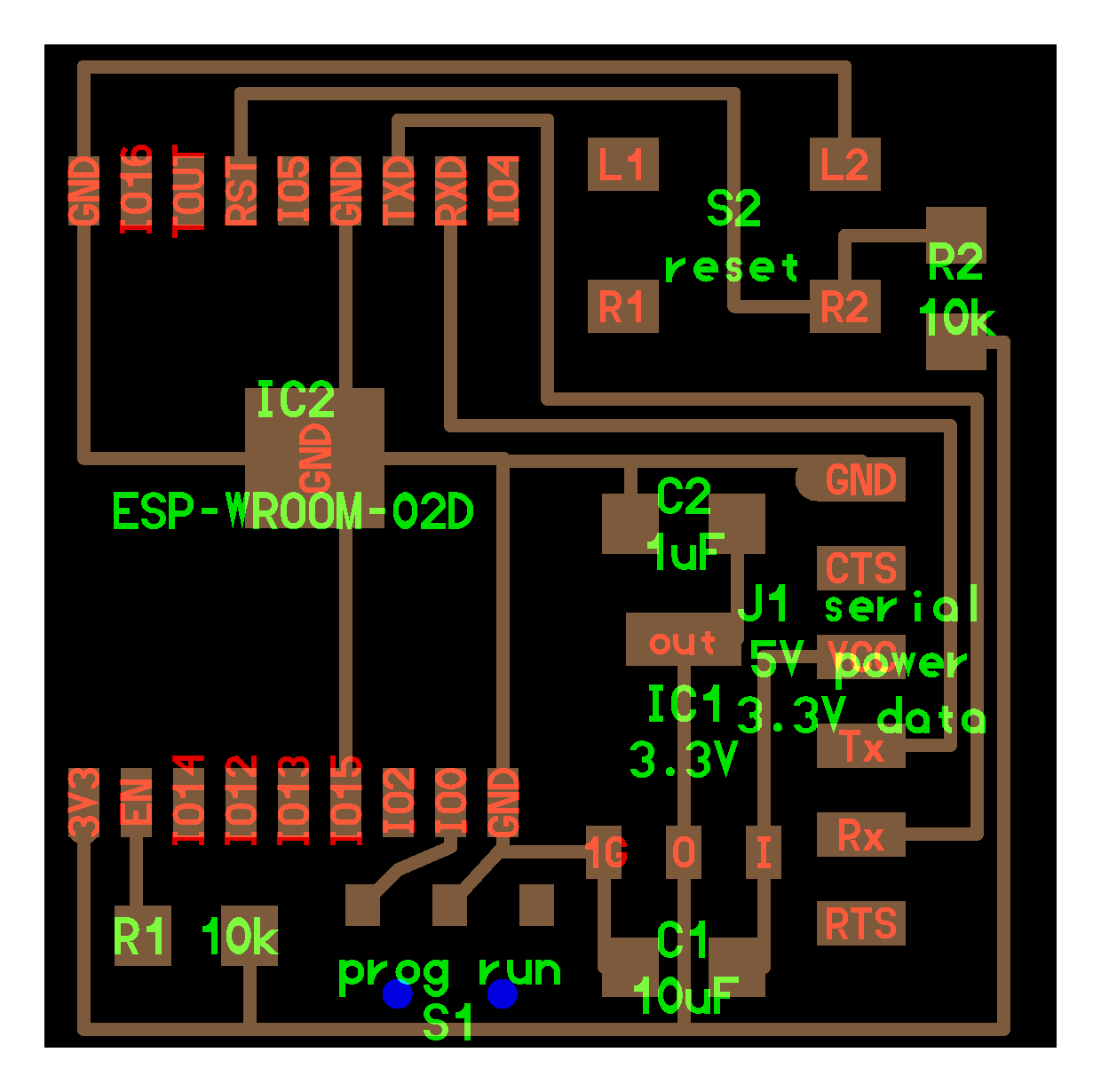
hello.ESP-WROOM-02D
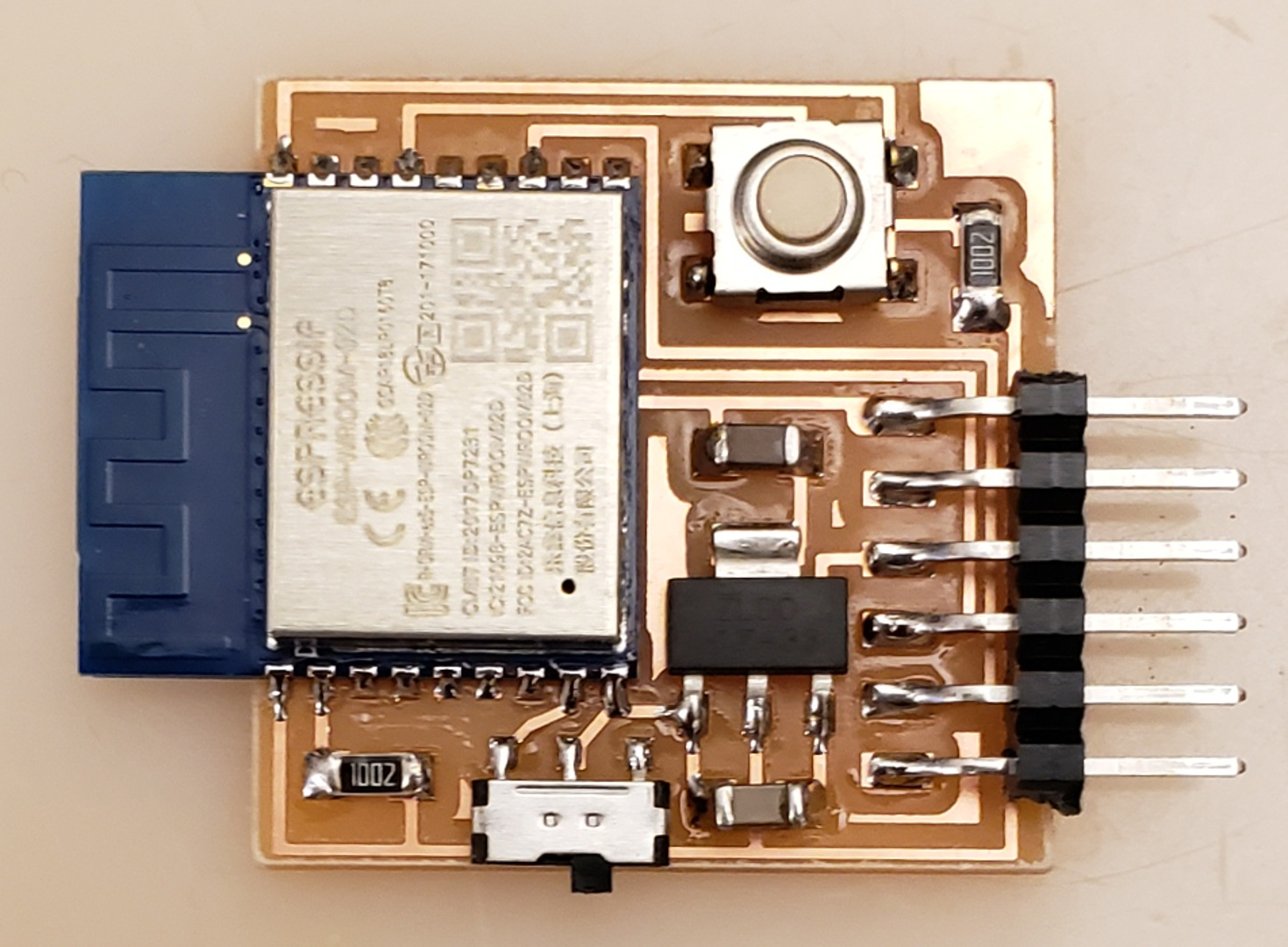
board
components
traces
holes
interior
Access point
video
ESP32 (2.4 GHz Wi-Fi, Bluetooth)
chip
module
board
pins power
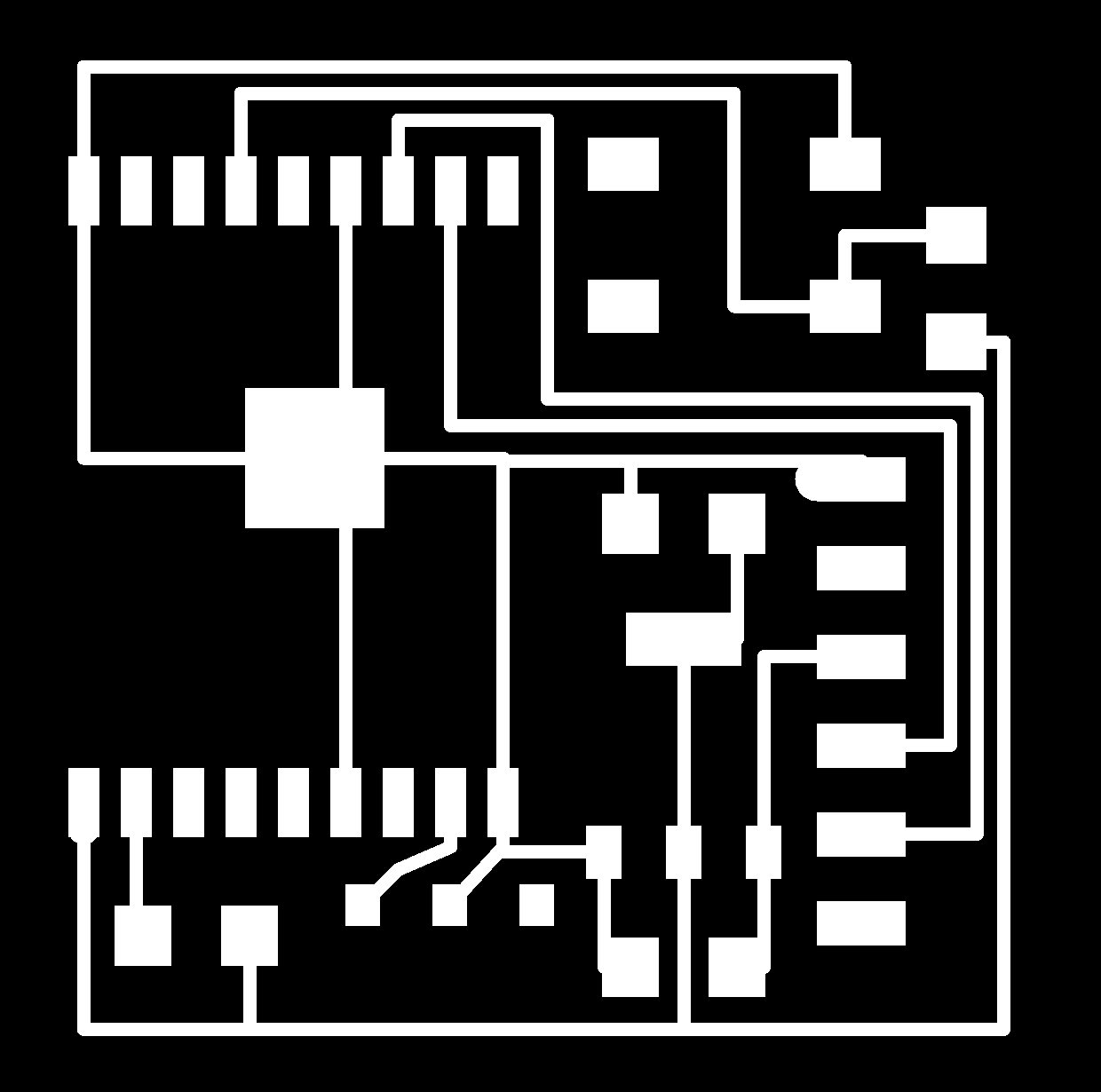
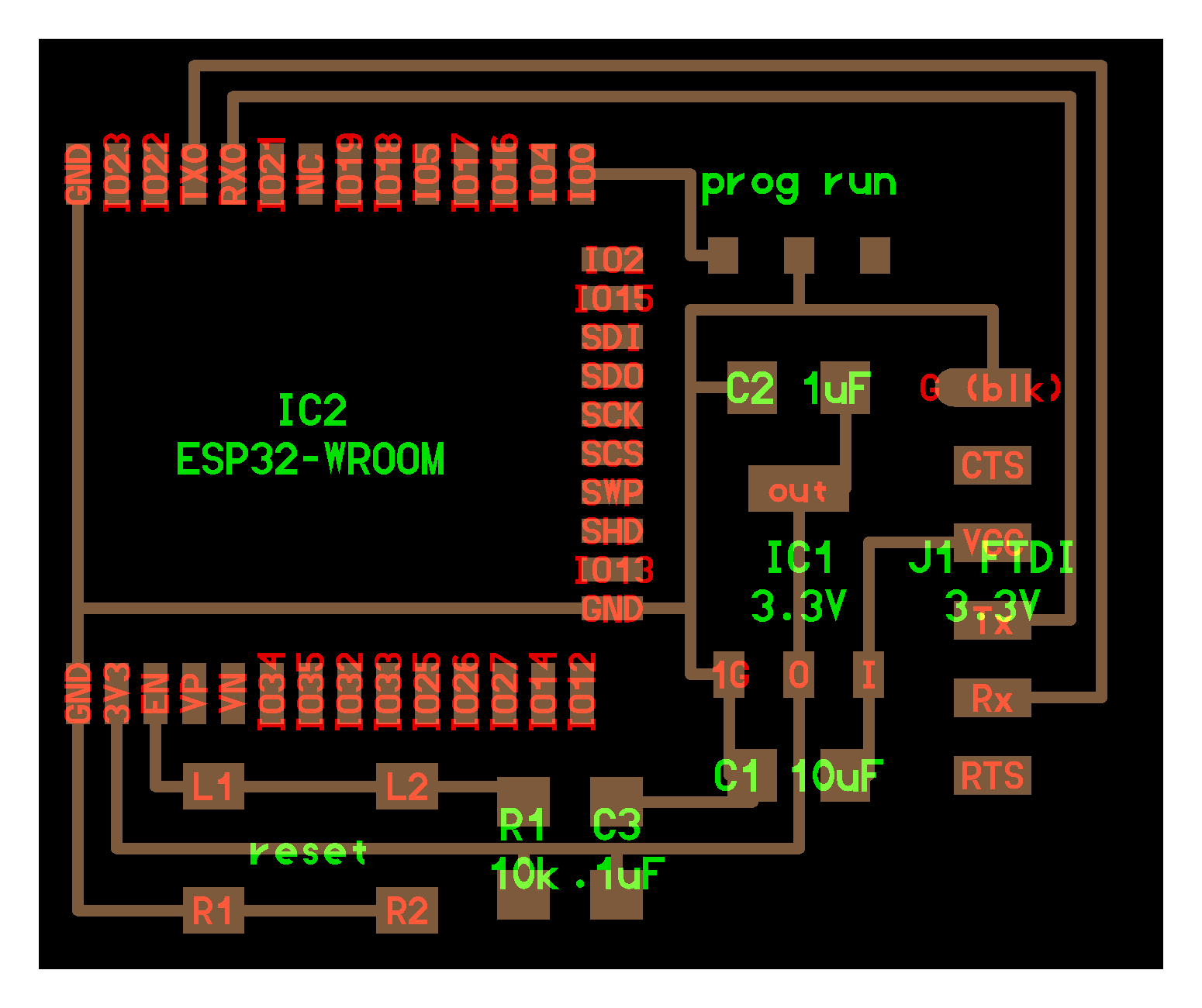
hello.ESP32-WROOM
board
components
traces
holes
interior
Web client
video
Web server
video
UDP
video
Bluetooth serial
video
802.11 LR
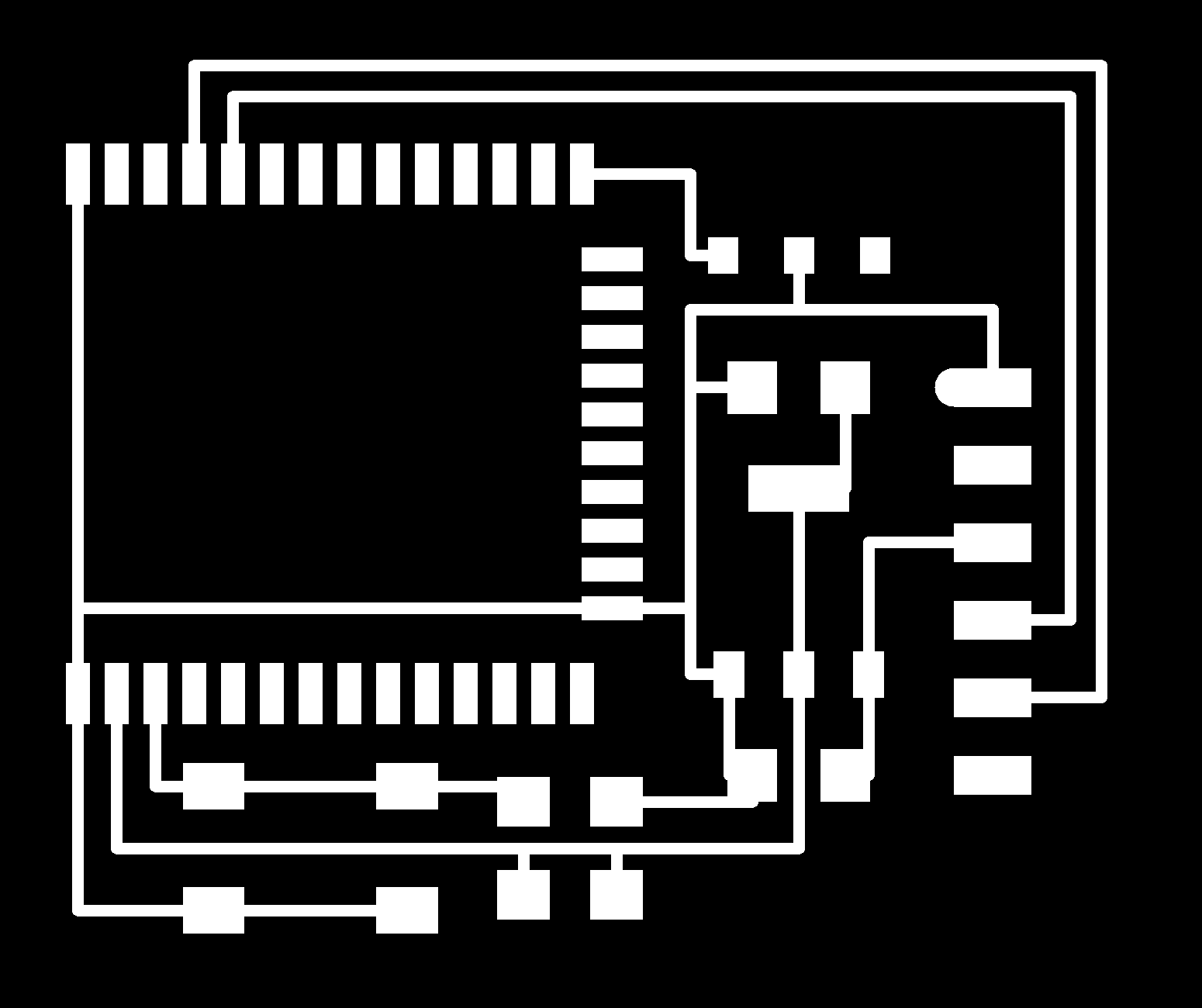
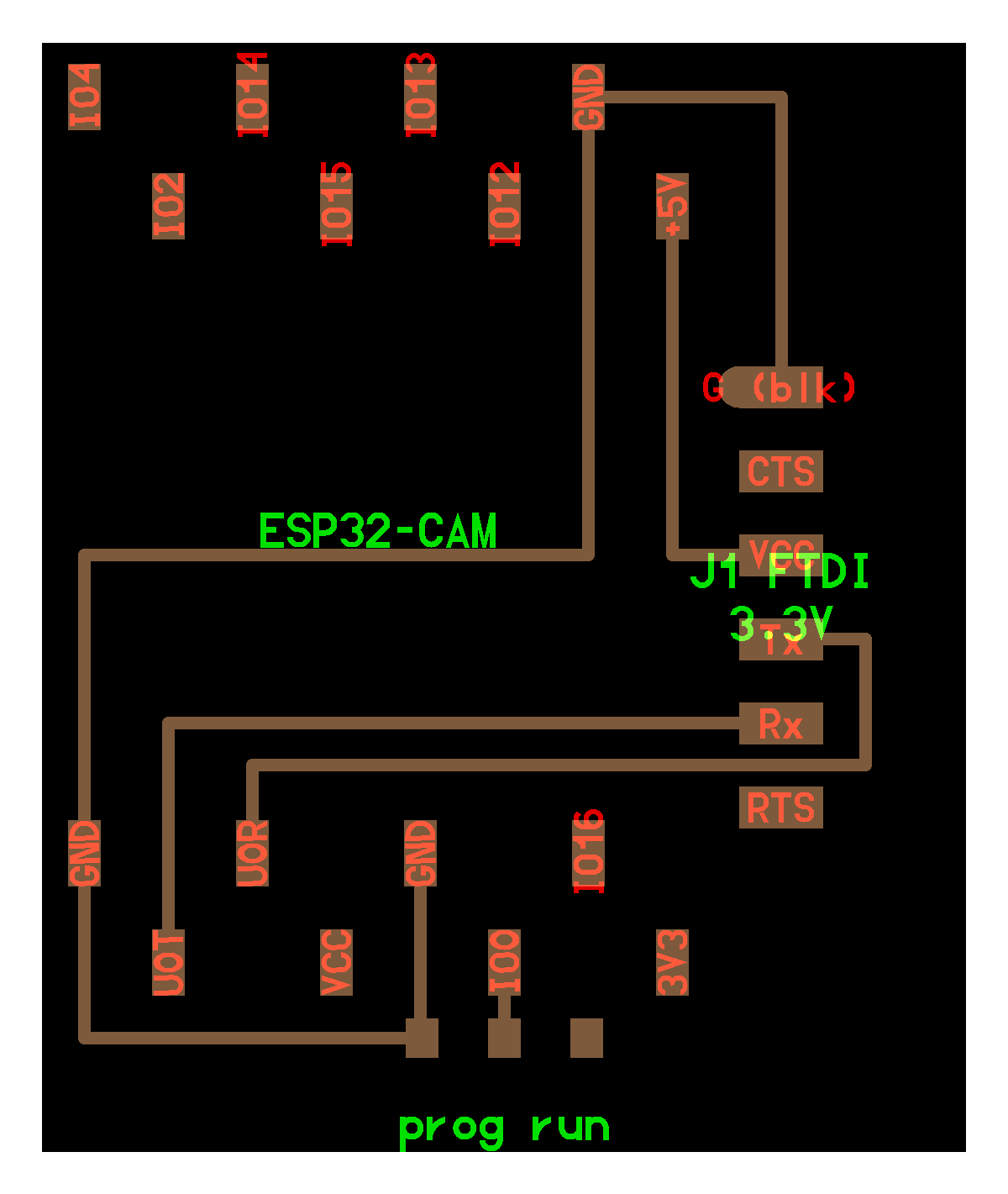
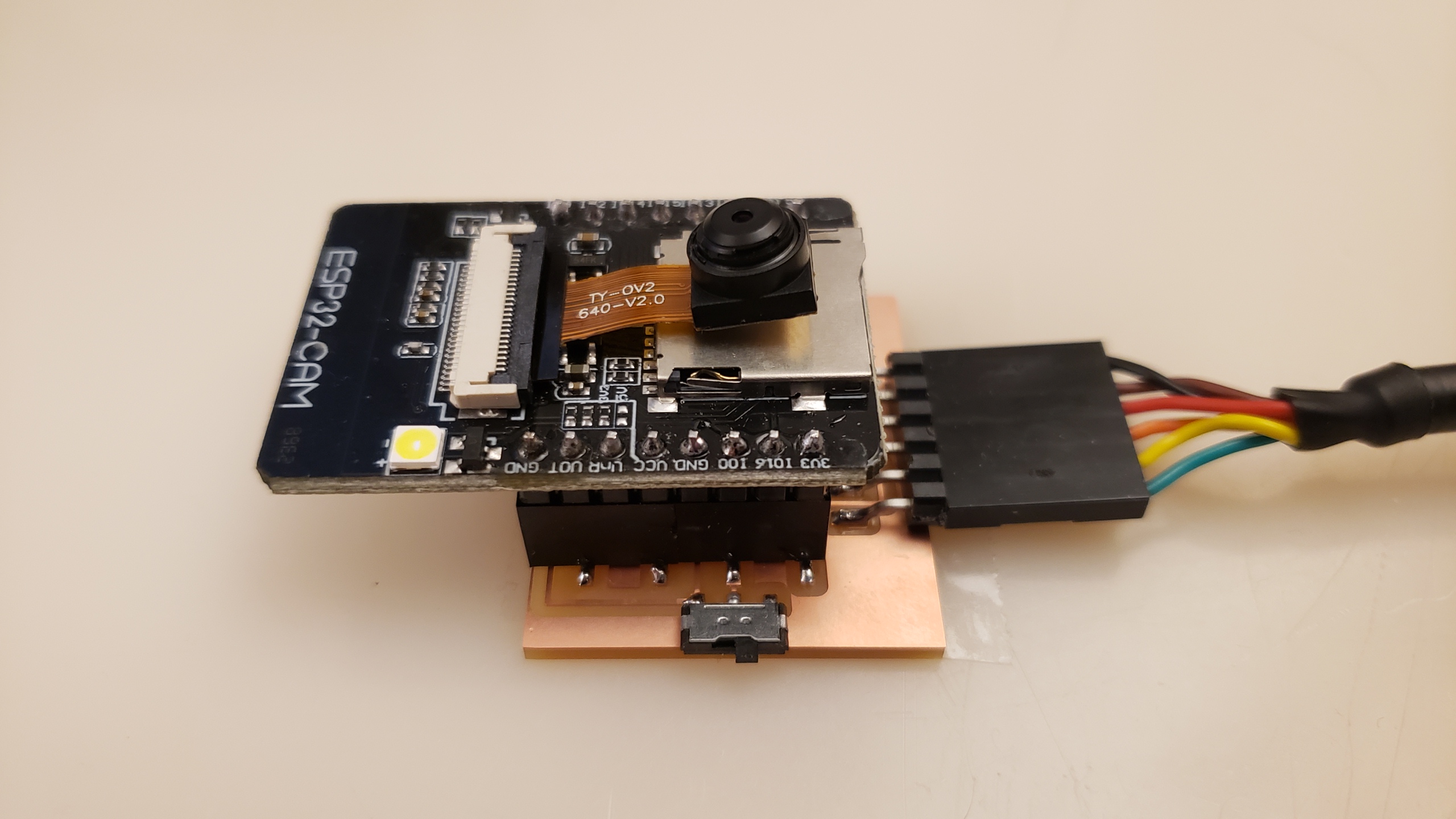
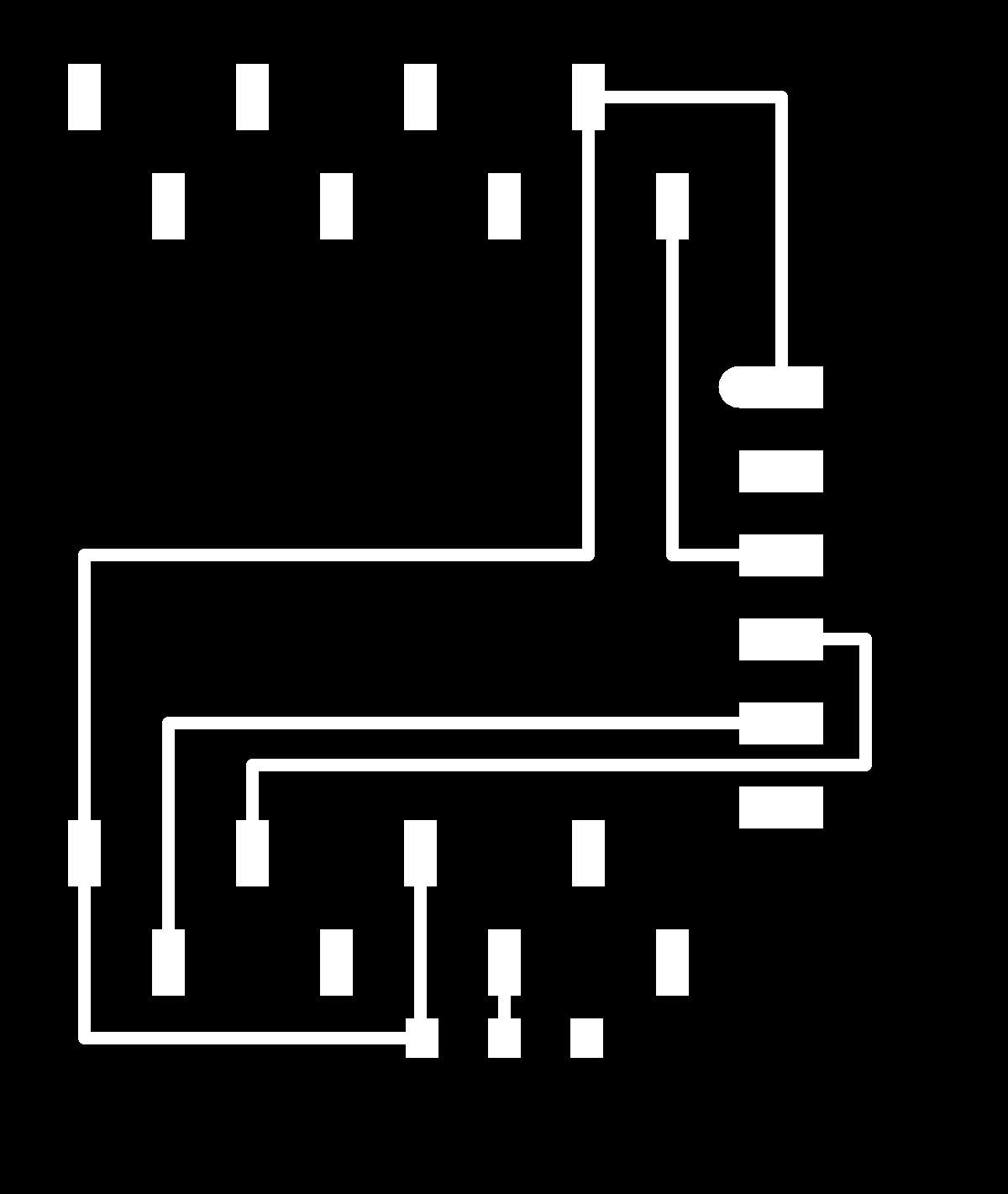
hello.ESP32-CAM
board
components
traces
holes
interior
camera
video
software radio
OpenWrt
assignment
individual assignment:
design, build, and connect wired or wireless node(s)
with network or bus addresses
group assignment:
send a message between two projects
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}